加 클리어패스, 무인지상차량(UGV) ‘허스키 업저버’ 발표모든 실외 자율 임무 프로그래밍 가능···무인 순찰·모니터링·데이터 수집·검사
승인 2023.03.24 11:34:44
▲캐나다 클리어 로보틱스의 완전통합 무인지상차량 시스템 '허스키 업저버' 모습 (사진=클리어패스)
캐나다의 연구개발용 이동 로봇 플랫폼 제조업체인 클리어패스 로보틱스(Clearpath Robotics)가 완전 통합 무인지상차량(UGV) 시스템인 허스키 업저버(Husky Observer)를 발표했다고 모바일로봇가이드가 20일(현지시각) 보도했다.
허스키의 이 새로운 구성 제품은 로봇 개발자와 기술 그룹이 검사 솔루션을 구축하고 시스템 개발을 신속하게 추적할 수 있도록 하는 것을 목표로 한다.
허스키 UGV는 전 세계 수백 명의 로봇 연구자와 엔지니어들이 신뢰하는 시험 및 테스트 기반 플랫폼이다.
이 플랫폼은 단순하고 견고한 디자인으로 모든 실제 지형을 견딜 수 있도록 제작돼 관측 임무에 이상적이다. 로봇운영시스템(ROS)을 지원하는 이 로봇은 복잡한 자율 시스템을 프로그래밍할 수 있다.
허스키 업저버는 과거 이뤄진 성공적 통합 프로젝트의 결과로서 허스키 UGV의 유연성을 보여주기 위해 설계됐다.
클리어 패스의 아웃도어 내브 오토노미(Outdoor Nav Autonomy) 소프트웨어(SW)와 함께 사전 설치된 허스키 업저버는 장비 모니터링, 원격 가상 검사 및 세부 무인 데이터 수집을 포함하지만 이에 국한되지 않는 모든 유형의 실외 자율 임무를 위해 구축됐다.
브라이언 웹 클리어패스 로보틱스 사장은 “우리는 10년 이상 고객이 그들의 로봇 프로젝트를 성공적으로 수행할 수 있도록 지원해 왔다. 허스키의 다기능성을 보여주는 것은 물론 우리 제품이 업계를 가속화할 수 있는 원격 검사에 우리의 경험과 기능을 제공하게 돼 기쁘다”고 말했다.
허스키 업저버에는 다양한 센서가 있어 사용자들이 관심 지점을 프로그래밍하고 오프라인 검토를 위해 데이터를 캡처할 수 있다.
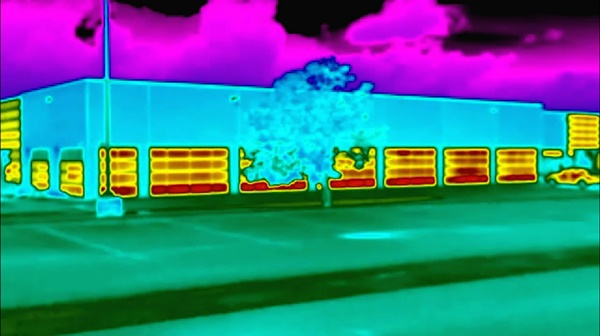
아래는 클리어패스 로보틱스의 로봇 관측 시스템(Robotic Observation Systems)이 데이터를 캡처한 스틸 사진이다.
▲허스키 업저버의 실외 열센서 데이터. (사진=클리어패스 로보틱스)
▲허스키 업저버의 실내 열센서 데이터. (사진=클리어패스 로보틱스)
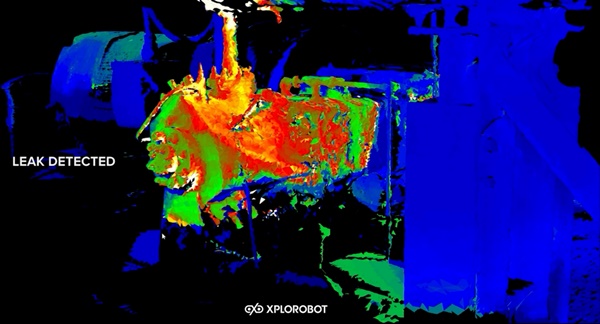
▲유출 검지를 위한 계층형 열 센서 데이터 (사진=클리어패스 로보틱스)
허스키 업저버에는 클리어패스의 아웃도어 내비게이션 자율 SW가 탑재돼 있어 개발자들이 야외 환경에서 자율주행을 위한 사용하기 쉬운 웹 인터페이스로 미션을 계획하고 실행할 수 있다.
웹 기반 사용자 인터페이스는 또한 원격 작동 모드를 지원해 사용자가 원격으로 차량을 제어할 수 있도록 한다.
아웃도어 내브(OutdoorNav)는 오디오, 이미지 및 비디오 캡처 및 선택적 열 캡처와 같은 여러 검사 작업을 즉시 지원한다.
이는 사용자가 자신의 사용자 지정 작업을 통합할 수 있는 인터페이스를 제공한다.
이 통합 시스템에는 고급 사용자가 자신만의 기능을 추가해 시스템 기능을 확장할 수 있는 완전한 기능을 갖춘 ROS API(ROS Application Programming Interface)가 제공된다.
허스키 업저버는 다음과 같은 목적으로 사용하는 기술 전문가에게 최적이다.
▲석유 및 가스 굴착 장치, 전기 변전소, 원자력 시설 및 태양광 및 풍력 발전소의 인프라, 고액 자산 및 안전에 중요한 장비에 대한 원격 가상 검사, 데이터 샘플링 및 이미지 캡처
▲현장에 대한 무인 데이터 수집, 스캔 및 품질 검사
▲원격 건설 현장 및 진행 상황 모니터링
▲옥외 개인 시설 및 보안시설에 대한 자율적 순찰 및 모니터링
▲환경 관찰, 실시간 이미지 전송 및 데이터 캡처
▲과수원, 포도밭 및 기타 가벼운 원예 환경에서 원격 작물 및 토양 모니터링.
허스키 업저버를 사용하면 로봇 공학 개발자들은 낮은 수준의 자율 탐색 및 센서 통합시 복잡성에 대해 걱정할 필요 없이 신속하게 애플리케이션을 실행할 수 있다. 클리어패스 로보틱스 서비스팀은 고객 요청에 따라 센서를 추가하고 통합할 수도 있다.