영국 요크대 연구팀, 사람에게 옷 입혀주는 양팔 로봇 기술 개발'IEEE 트랜젝션스 온 로보틱스'에 연구 논문 발표
승인 2024.03.06 16:45:18
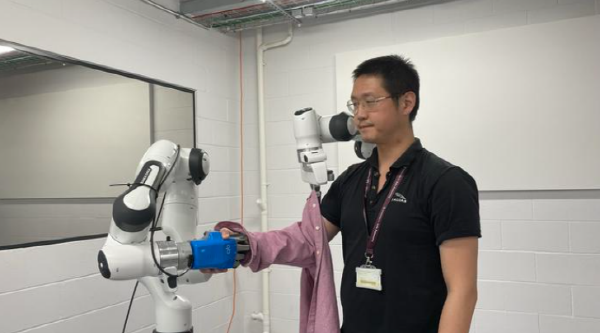
▲ 양팔 로봇이 사람에게 옷을 입혀주고 있다(사진=요크대)
영국 요크대 산하 '안전자율성연구소(Institute for Safe Autonomy)' 연구팀은 간병인들이 노인이나 장애인에게 옷을 입혀줄 때 두 손을 사용해 옷을 입히는 것처럼, 간병인의 두 손 동작을 모방해 옷을 입혀주는 양팔 로봇 기술을 개발했다고 4일(현지 시각) 밝혔다.
그동안 연구기관들은 노인이나 장애인의 옷 입는 것을 도와주기 위해 옷을 입혀주는 한팔 로봇을 주로 개발해왔다. 하지만 한팔 로봇은 돌봄 서비스를 받는 사람이 불편하게 생각하거나 실용적이지 않은 것으로 나타났다.
이 같은 문제를 해결하기 위해 요크대 연구팀은 이전 연구에서 시도되지 않았던 양팔 로봇 보조 드레싱 계획을 제안했다. 이번 연구는 돌봄을 받는 사람의 불편과 고통을 줄이기 위해 특정 행동이 필요하다는 것을 시연한 간병인으로부터 영감을 받았다.
연구팀은 “이 기술이 사회적 돌봄 시스템에서 돌봄 종사자가 실용적인 작업에 더 적은 시간을 할애하고, 개인의 건강과 정신적 안정에 더 많은 시간을 할애할 수 있도록 하는 데 중요할 수 있다”고 말했다.
연구팀은 로봇으로 하여금 간병인의 동작을 관찰하고 학습하도록 한 다음에, 인공지능을 통해 간병인의 옷입히는 동작을 흉내낼 수 있는 인공지능 모델을 생성했다. 이 모델은 옷을 입히는 데 두 개의 손이 필요하다는 것을 보여줄 수 있는 데이터, 팔이 만드는 각도에 대한 정보, 그리고 사람이 개입하거나 특정 동작을 멈추거나 바꿀 필요가 있다는 것을 보여주는 데이터를 수집할 수 있도록 해준다.
연구팀은 ‘시연으로부터 배우기(learning from demonstration)'라는 방법을 채택했다. 이것은 로봇의 프로그램을 짜기 위해 전문가가 필요하지 않고, 사람은 로봇에 필요한 동작을 보여주기만 하면 로봇이 그 동작을 배울 수 있다는 것을 의미한다.
이번 연구는 전문 학술지인 'IEEE 트랜젝션스 온 로보틱스(IEEE Transactions on Robotics)'에 발표됐다.(연구 논문 제목:Do You Need a Hand? – A Bimanual Robotic Dressing Assistance Scheme)
이번 연구는 델프트공대, 혼다 유럽연구소와의 협업으로 이뤄졌으며 혼다 유럽연구소로부터 자금을 지원받았다.