| |
 |
|
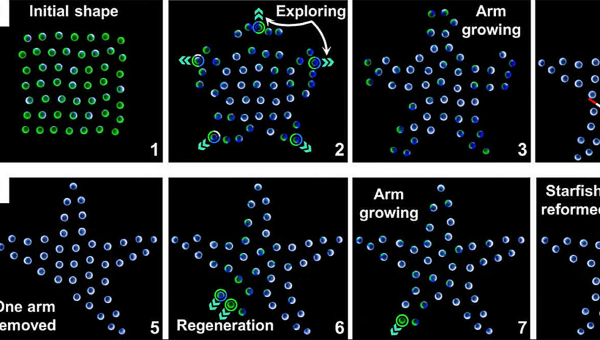
| ▲군집 로봇들이 별 모양을 만들고 있는 모습(사진=셰필드대) |
영국 셰필드대(University of Sheffield) 연구팀이 특정한 문자나 형상을 조합할 수 있는 군집 로봇 기술을 개발했다고 테크엑스플로어가 12일 보도했다.
연구팀은 ’평균 이동 탐색(mean-shift exploration)‘이라는 알고리즘을 바탕으로 군집 로봇의 형상 조합을 위한 새로운 전략을 제안했다. 이번 연구 성과는 전문 학술지인 '네이처 커뮤니케이션즈'에 발표됐다.(논문 제목:Mean-shift exploration in shape assembly of robot swarms)
셰필드대 로데리치 그로스 박사는 웨스트레이크대학, 중국 베이항대학, 중국 칭화대 연구자들과 공동으로 이번 연구를 수행했다.
로봇은 주변 로봇과 비어있는 위치에 둘러싸여 있을 때 원하는 형상을 만들기 위해 근처의 비어있는 위치에서 가장 높은 밀도를 탐색하고, 현재 위치를 적극적으로 포기하는 전략을 활용한다. 연구팀은 밀도 함수의 최대값을 찾기 위해 기계학습에서 널리 사용되는 최적화 기법인 평균 이동 알고리즘을 적용했다. 다른 로봇과 비어있는 위치에 둘러싸여 있을 때 로봇은 평균 이동 최적화 알고리즘에 따라 근처 비어있는 위치의 가장 높은 밀도를 탐색해 원하는 형상을 만든다.
연구팀은 50대의 군집 로봇을 대상으로 실험을 통해 연구 성과를 검증했다. 50대의 군집 로봇을 이용해 로봇들이 협력해 ’ROBOT’이라는 알파벳 문자를 만들고, 별 모양을 조합하는 여러 테스트를 실시했다. 이번 연구는 형상 재생, 협동적 화물 운송, 복잡한 환경 탐사 등 군집 로봇의 행동을 생성하는 데 적용될 수 있다. |
















