|
중국과학원(CAS) 허페이물질과학연구원(中国科学院 合肥物质科学研究院, HFIPS) 연구팀이 덩굴손에서 영감을 얻어 액체금속을 활용한 광열 액추에이터를 개발했다고 10일 밝혔다. 플렉서블 로봇을 만드는 데 활용될 수 있을 것으로 기대된다.
연구팀은 액체금속을 활용해 비대칭 열 팽창에 기반한 프로그래밍 가능한 광열 액추에이터(photothermal actuators)를 개발하고, 연구 논문을 전문 학술지인 ‘어드밴스드 펑셔널 머티리얼스(Advanced Functional Materials)’에 발표했다고 밝혔다.
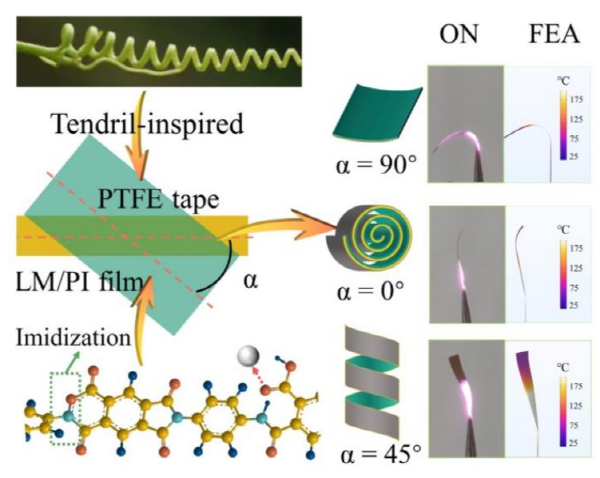
논문 제1저자인 리 샤오페이 박사는 “우리는 덩굴손 끝의 민감한 부분이 한쪽으로 수축하는 방식에서 영감을 얻었다. 덩굴손 같은 액추에이터는 맞춤형의 초기 형태를 갖는다"고 말했다. 연구팀은 이번 연구에서 햇빛을 탐색하는 식물의 능력을 모방해 LM/PI(liquid metal/ polyimide) 필름과 PTFE 테이프를 활용해 광열 액추에이터를 개발했다. PTFE 테이프가 수축과 굽힘이 가능한 원형질(protoplasm) 역할을 수행하는 동안, LM/PI 필름을 지지물과 광열층으로 사용했다.
| |
 |
|
| ▲ 액추에이터의 개념과 구조 |
리 샤오페이 박사는 "PTFE 테이프를 LM/PI 필름에 여러 각도에서 조립하면 덩굴손처럼 휘어져 다양한 형태를 얻을 수 있으며 프로그래밍이 가능하다"고 말했다.
이번에 개발된 액추에이터는 큰 변형, 빠른 반응, 우수한 안정성, 고하중 지지능력을 특징으로 한다. 플렉서블 로봇, 스마트 디바이스 및 바이오닉 시스템에서 연구와 실용화를 촉진할 전망이다. 연구팀은 액추에이터를 모델링하고, 유한 요소 분석(finite element analysis)으로 구부러지는 형태를 정확하게 예측했다.
연구팀은 초기 형태의 프로그래밍 가능성과 모델 예측을 바탕으로 기어가기, 구르기, 유영하기, 잡기, 핸들링이 가능한 로봇을 성공적으로 설계했다고 밝혔다. |

















