美 CMU, ‘파쿠르’ 동작 수행하는 4족 보행 로봇 개발기울어진 경사로를 달리는 극한의 파쿠르 동작 등 수행
승인 2023.10.25 07:47:28
▲4족 보행로봇이 한 경사로에서 다른 경사로로 뛰어넘고 있다.(사진=CMU)
美 카네기멜론대(CMU) 연구팀이 다양한 ‘파쿠르(Parkour)’ 동작을 수행하는 4족 보행 로봇 기술을 선보였다. 파쿠르는 도시와 자연환경 속에 존재하는 다양한 장애물들을 활용해 효율적으로 이동하는 개인 훈련을 의미한다.
CMU 딥팍 파탁(Deepak Pathak) 교수팀은 저가의 4족 보행 로봇을 활용해 ▲자신의 키의 2배에 달하는 장애물을 뛰어넘고 ▲자신의 길이의 2배에 달하는 틈(gap)을 건너고 ▲계단에서 물구나무 서기 동작을 하면서 이동하고 ▲기울어진 경사로를 달리는 극한의 파쿠르 동작을 수행하는 기술을 선보였다.
연구팀에 따르면 인간은 정확한 눈근육 조정(eyemuscle coordination)과 움직임이 필요한 매우 역동적인 방식으로 장애물을 횡단하여 파쿠르를 수행한다. 로봇이 동일한 작업을 수행하기 위해선 유사한 도전 과제를 극복해야 한다. 이는 인식, 작동 및 제어 시스템을 매우 낮은 오차를 허용하면서 독립적으로 엔지니어링해 수행된다.
연구팀은 부정확한 액추에이션(작동)을 가진 소형 저비용 로봇과 취약한 인식능력을 제공하는 단일 전면 심도 카메라를 활용해 로봇 파쿠르를 개발하는 것과 유사한 접근법을 취했다고 밝혔다.
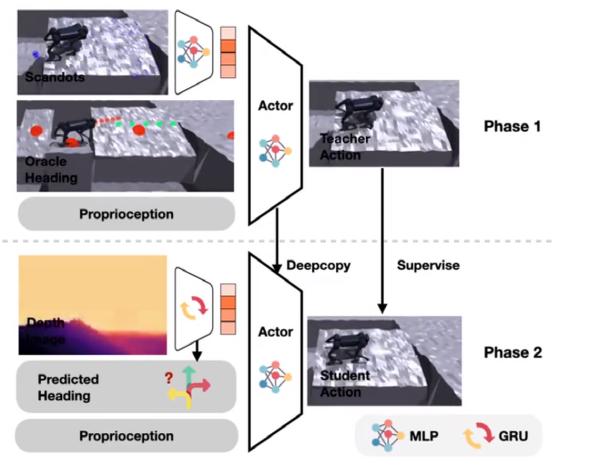
연구팀은 시뮬레이션 환경에서 대규모 강화학습(RL) 방식으로 훈련된 카메라 영상으로부터 직접 작동하는 단일 신경망 정책(single neural net policy)이 부정확한 센싱 및 작동을 극복하고, 매우 정확한 제어 동작을 출력하는 방법을 보여준다고 설명했다.