출입문과 식기세척기 문 여닫는 4족 보행 로봇 '애니멀'스위스 취리히연방공대, '사이언스 로보틱스'에 연구 성과 발표
승인 2023.08.21 17:20:43
▲ 애니멀이 출입문을 여닫는 모습
스위스 취리히연방공대(ETH Zurich) 연구팀은 로봇이 사람으로부터 최소한의 명령을 받고, 스스로 과제를 수행할 수 있도록 도와주는 프레임워크를 개발했다고 테크엑스플로어가 지난 17일 보도했다.
이번 연구 성과는 로봇 전문 학술지인 ‘사이언스 로보틱스’에 게재됐다(논문 제목: "Versatile multicontact planning and control for legged loco-manipulation").
취리히연방공대 산하 로봇시스템연구소 소속 쟝-피에르 슬레이먼과 마르코 헌터 등 연구팀은 ‘사전 녹화되어 있는 전문가들의 시연‘에 의존하지 않고 로봇이 과제를 스스로 수행할 수 있도록 도와주는 프로그램을 개발했다고 밝혔다.
연구팀은 "과제를 해결하는 실현 가능하고 '최적에 가까운 다중 모드 시퀀스(near optimal multi-modal sequence)'를 신속하게 발견할 수 있는 접근법을 설계했다“고 말했다. 로봇이 인간 조작자로부터 받은 최소한의 지침으로 목표를 달성할 수 있는 환경을 제공할 수 있다는 설명이다.
이번 연구를 주도한 쟝-피에르 슬레이만은 ”우리의 동작 계획자(planner)는 로봇이 어떻게 움직여야 하는지, 어떤 힘을 행사해야 하는지, 어떤 팔다리를 사용해야 하는지, 그리고 언제 어디서 물체와 접촉하거나 끊어야 하는지를 총체적으로 발견할 수 있도록 해준다“고 말했다.
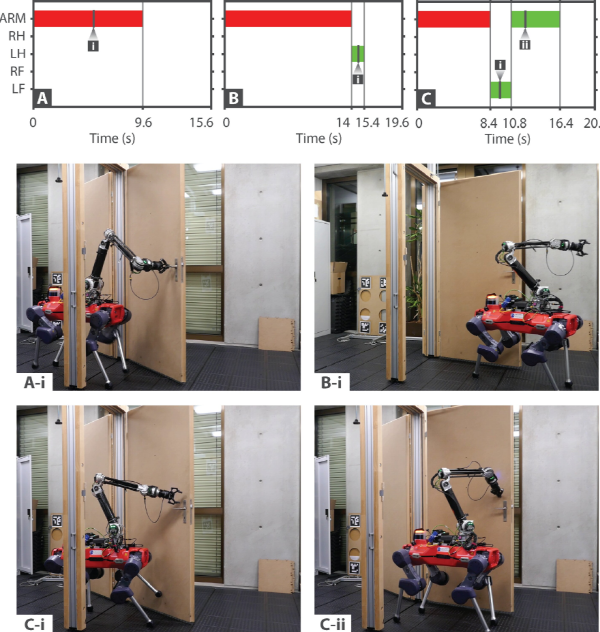
▲ 애니멀의 문 여닫는 동작 테스트 결과
연구팀은 이번 연구 성과를 애니보틱스의 4족 보행 로봇 ‘애니멀’에 적용해 테스트했다. 실험 결과 애니멀은 식기세척기 문을 열고, 출입문을 여닫는 동작을 능숙하게 구현하는 모습을 보여줬다.
연구팀은 "이번에 개발한 프레임워크를 다양한 종류의 모바일 매니퓰레이터에 쉽게 적응할 수 있다“고 말했다.