美 스탠포드대, 도마뱀에서 영감 얻은 '로봇핸드' 개발'사이언스 로보틱스'에 연구 논문 발표
승인 2021.12.17 15:34:02
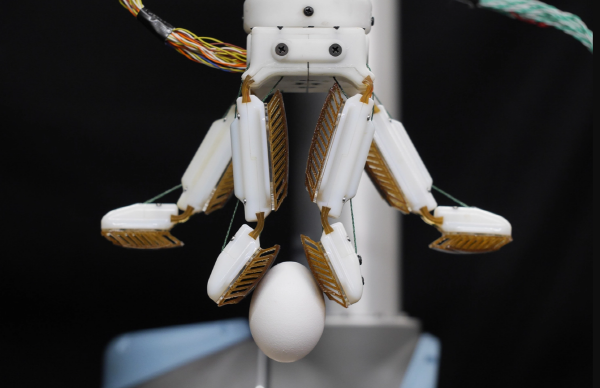
▲ 팜핸드(사진=스탠포드대)
美 스탠포드대 산하 ‘생체모방 및 능숙조작연구소(Biomimetics and Dextrous Manipulation Lab)’ 연구진이 달걀, 접시, 과일, 농구공, 물병 등 다양한 물체를 능숙하게 다룰 수 있는 로봇 손 ‘팜핸드(farmHand)’를 개발했다고 지난 15일(현지 시각) 밝혔다.
이 대학 졸업생인 윌슨 루오톨로와 데인 브라우어는 도마뱀의 발가락 구조에서 영감을 얻어 다재다능한 로봇 핸드 ‘팜핸드’를 개발하고, 로봇 전문 저널인 ‘사이언스 로보틱스’에 논문을 게재했다.
연구팀은 2가지 생물학적 영감에서 아이디어를 얻어 팜핸드를 개발했다. 4개의 손가락으로 이뤄진 로봇 핸드는 사람의 손처럼 관절을 갖고 있으며, 각각의 손가락은 도마뱀의 발바닥에서 영감을 얻어 접착제 같은 기능을 갖췄다. 도마뱀 발바닥은 '반 데르 발스의 힘(van der Waals force)'이 작용하는 것으로 알려지고 있다. 도마뱀의 발바닥에 있는 미세한 강모가 분자간 인력인 반데르 발스 힘을 생성한다는 것.
논문 주요 저자인 마크 컷코스키 교수는 지난 10년간 생체모방 및 능숙조작연구소를 이끌면서 거칠지만 끈적끈적하지 않은 로봇 핸드 개발에 주력해왔다. 연구진은 사람의 손을 모방한 로봇 그리퍼에 도마뱀 발가락의 접착성을 구현하기 위해 팜핸드의 손가락을 제어하는 힘줄과 접착제 아래부분에 있는 손가락 패드(finger pad) 설계에 특별한 주의를 기울였다. 아래는 스탠포드대 연구진이 공개한 동영상이다.