지형 틈새(gap)를 빠르게 뛰어넘는 미니 치타 로봇MIT CSAIL, '로봇학습 컨퍼런스'에서 발표 예정
승인 2021.11.01 12:48:59
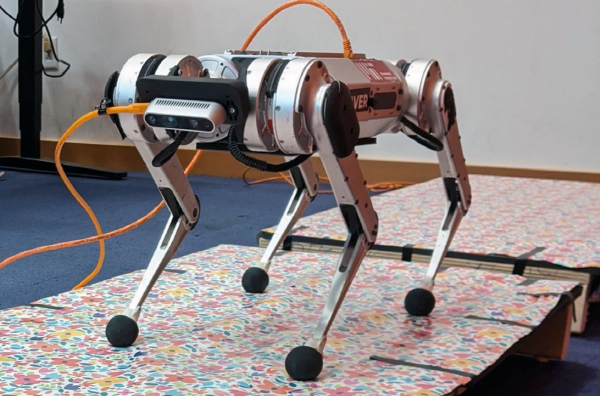
▲ 지형의 틈새를 빠르게 뛰어넘는 미니 치타 로봇(사진=MIT 뉴스)
MIT CSAIL(컴퓨터과학 및 인공지능연구소) 소속 연구진이 틈새(gap)가 있는 지형을 빠르고 민첩하게 뛰어넘을 수 있는 4족보행 로봇 기술을 개발했다고 MIT뉴스가 보도했다.
자연에서 생존하는 치타는 굴곡이 심하며, 중간에 틈새가 깊이 패여있는 지형을 자연스럽게 뛰어넘을 수 있다. 하지만 4족보행 로봇에게 이런 동작은 쉽지 않다. 4족보행 로봇이 틈새가 있는 지형을 뛰어넘기 위해선 컴퓨터 비전 센서를 이용해 지형의 변화를 실시간으로 인식하고, 보행 동작을 명령해야 한다. 하지만 비전 센서 기술을 지금까지 개발된 민첩한 로봇시스템에 적용하는 데는 기술적인 한계가 있었다.
MIT CSAIL 풀킷 아그라왈 교수와 가브리엘 마골리스 연구원(박사과정) 등은 빠른 속도와 민첩성으로 틈새가 있는 지형을 점핑할 수 있는 보행 로봇 기술을 개발하고, 이달 개최 예정인 ‘로봇 학습 컨퍼런스(The Conference on Robot Learning)’에서 발표할 예정이다.
MIT 연구진은 이번에 개발한 새로운 제어시스템을 김상배 교수가 개발한 4족보행 로봇 ‘미니 치타’에 적용했다. 이 제어시스템은 로봇 전면부에 부착한 비디오 카메라를 통해 실시간으로 들어오는 입력 데이터를 처리하는 부분과, 해당 정보를 로봇이 어떻게 움직여야 하는가에 관한 명령으로 변환하는 또 다른 부분으로 구성되어 있다.
2개의 부분으로 이뤄진 제어 시스템은 지형 정보를 사전에 매핑할 필요가 없어 로봇이 어디든지 갈수 있다는 게 연구진 설명이다. 향후 로봇이 긴급 대응업무를 수행하기 위해 숲속으로 돌진하거나 격리된 노인들에게 약을 전달하기 위해 계단을 오르는 것과 같은 임무에 활용할 수 있을 것으로 기대된다.
컨트롤러는 로봇 상태를 로봇이 수행하는 일련의 동작으로 변환하는 알고리즘이다. 많은 블라인드 컨트롤러(비전을 통합하지 않는 컨트롤러)는 강력하고 효과적이지만 로봇이 연속적인 지형만 걸을 수 있게 해준다. 비전을 포함하는 시스템은 일반적으로 지형의 ‘높이지도(heightmap)’에 의존하는데, 이는 사전에 구성되거나 즉석에서 생성되어야 한다.
MIT 연구진은 강력한 블라인드 컨트롤러로부터 최고의 요소들을 추출해 실시간으로 시각을 처리하는 별도의 모듈과 결합했다. 로봇 카메라는 지형의 심도 이미지를 캡처해 로봇 몸체의 상태(관절 각도, 몸체의 방향 등)에 대한 정보와 함께 고급 컨트롤러로 전송한다. 고급 컨트롤러는 경험을 통해 학습하는 신경 네트워크다. 신경망은 목표 궤적을 출력하고, 로봇의 12개 관절 각각에 대한 토크를 산출하는 데 사용한다. 여기에 낮은 수준의 컨트롤러는 신경망이 아니지만 로봇의 동작을 설명하는 간결한 물리적 방정식들에 의존한다.
연구진은 고급 컨트롤러를 훈련시키기 위해 강화학습 방식을 활용했다. 수백 개의 불연속적인 지형을 횡단하는 로봇 시뮬레이션을 실시했고, 성공적인 횡단에 대해 보상을 주었다. 이를 통해 알고리즘은 어떤 행동이 보상을 극대화하는지 학습했다.
연구진은 나무 판자로 물리적인 지형을 만들고 미니 치타를 활용해 제어 체제(control scheme)를 시험했다. 시험 결과 연구진이 개발한 제어 시스템이 하나의 컨트롤러만 사용한는 다른 제어 시스템에 비해 성능이 뛰어나다는 것을 확인했다. 미니 치타가 틈새가 있는 지형을 통과하는 성공률이 90%에 달했다.