| |
 |
|
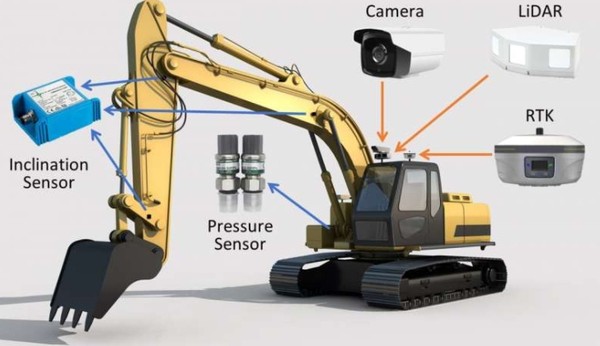
| ▲매릴랜드대와 중국 바이두 로봇· 자율주행연구소(RAL· Baidu Research Robotics and Auto-Driving Lab) 연구진이 개발한 ‘자율굴삭기시스템(AES·autonomous excavator system)’ |
美매릴랜드대와 중국 바이두 로봇·자율주행연구소(RAL·Baidu Research Robotics and Auto-Driving Lab) 연구진이 ‘자율굴삭기시스템(AES·autonomous excavator system)’을 개발했다고 테크익스플로어가 30일(현지 시각) 보도했다.
이 시스템은 카메라, 라이다, 압력센서, RTK(Real-Time Kinematic) GPS 등을 탑재하고 있으며 기존 굴삭기에 설치해 무인 자율굴삭기로 전환해준다. 연구진은 AES가 실제 세계 시나리오상에서 활용가능한 무인 굴삭시스템으로 사람의 간섭없이 장시간 작업을 수행할 수 있다고 밝혔다. 연구진은 이번 연구 성과를 ‘사이언스 로보틱스’ 최근호(6월 30일자)에 발표했다. 바이두 RAL 소장인 '리엔전 장' 박사는 AES에 대해 “다양한 크기의 굴삭기에 탑재해 효과적이고 강건하게 굴삭 작업을 자율 수행할수 있는 아키텍처”라고 소개했다.
굴삭기는 인프라 건설, 광산, 인명 구조 작업 등 다양한 분야에서 활용되는 필수 장비다. 전세계 굴삭기 시장은 지난 2018년 441억 달러에서 2026년 631억 달러로 성장할 것으로 예측되고 있다.
하지만 건설업체들은 숙력된 굴삭기 운전자 부족으로 어려움을 겪고 있으며 코로나의 유행으로 인력 부족 현상은 심화되고 있다. 게다가 굴삭기 운전자들의 작업 환경은 매우 위험하고 열악해 사고가 빈발하고 있다. 미국에서만 연간 200명의 사망 사고가 발생한다.
이번에 개발한 AES는 3D 환경을 인식할 수 있는 다중 인식 모듈과 깨끗한 이미지를 얻을 수 있는 신경망 및 실시간 알고리즘을 채택하고 있다. AES 아키텍처는 6.5톤, 7.5톤, 33.5톤, 49톤 등 여러 크기의 굴삭기에 적용할 수 있다는 게 연구진의 설명이다. 바이두는 전세계 다수의 건설장비업체들과 협력해 겨울 날씨 등 다양한 환경에서 AES의 신뢰성을 테스트했다고 밝혔다.
왕 하이펑 바이두 CTO는 “우리는 우리의 안전한 플랫폼을 강력한 인공지능과 클라우드 능력과 결합해 건설산업을 변화시키는데 힘을 모을 것”이라고 말했다. |
















