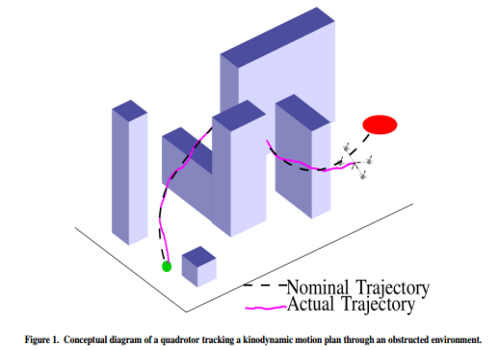
수많은 차량과 행인으로 붐비는 도심을 달리는 자율주행 자동차나 고층 빌딩 사이를 비행하는 드론은 예상하지 못한 주변 환경에 실시간으로 대응하면서 정해진 장소를 가야한다. 예상치 못한 곳에서 불쑥 튀어나온 장애물을 피해 목표지점을 가려면 ‘실시간 운동역학 동작계획(real-time kinodynamic motion planning)’이란 기술을 구현해야한다.
‘IEEE 스펙트럼’에 따르면 스탠포드대학 산하 ‘자율시스템연구소’ 박사과정인 ‘로스 알랜(Ross Allen)’ 등 연구팀은 쿼드콥터 드론에 ‘실시간 운동역학 동작계획’을 처음으로 구현했다. 펜싱을 즐기는 알랜은 드론을 상대로 펜싱을 하면서 쿼드콥터 드론이 어떻게 펜싱 검을 피하고 안정적인 비행 상태를 유지하는지를 기술적으로 구현했다. 검의 움직임 등 주변 환경을 인식하면서 드론이 운동역학적인 관점에서 최적의 동작계획을 실시간으로 짜는 것.
▲ 시스템 구성
알랜 등 연구자들은 이번 연구 성과를 ‘A Real-Time Framework for Kinodynamic Planning with Application to Quadrotor Obstacle Avoidance’이라는 논문으로 발표했다. 이번 연구에는 머신러닝과 의사결정 기술이 적용됐다. 시스템은 외부에 설치되는 비콘 동작 추적기, 동작 계획을 실행하는 워크스테이션, 쿼드콥터 드론 등으로 구성됐다. 검의 움직임을 동작 추적기에서 포착해 위치 데이터와 장애물 데이터를 워크스테이션에 보내면 워크스테이션에서 실시간으로 분석해 동작계획을 짠후에 드론에 위치데이터를 전송한다. 드론의 펜싱 검을 피하는 방법이다.
연구자들은 이번 연구 성과를 드론은 물론이고 자율주행자동차, 로켓 등 여러 분야에 적용할수 있다고 밝혔다.