|
가감속 제어란?
2015년 3월부터 약 5개월간 12명의 경기북과학고 학생들은 ‘로봇 공학 연구’라는 정보과학 분야의 특기적성 프로그램을 수강하였다. 이름에서도 알 수 있듯이 로봇공학 분야의 흥미로운 연구 주제를 선정하여 프로젝트를 수행하는 자기주도적 성격의 강좌이다. 지도교사이신 정웅열 선생님께서는 강좌 초기에 파일럿 프로젝트를 제시하셨는데, 그것이 바로 가감속 제어였다. 실제 산업 현장에서는 생산성을 향상시키기 위해 공정 과정을 고속화하고자 하는데, 장치 자체의 급격한 속도변화와 관성으로 인하여 많은 진동이 발생하게 되고, 이는 ‘고체의 틀어짐’이나 ‘액체의 쏟아짐’ 등의 부작용을 낳게 된다. 이와 같은 문제점을 해결하기 위한 한 가지 제어 방법이 바로 ‘가감속 제어’이다.
수강생은 두 명 씩 짝을 이루어 레고 마인드스톰 NXT, 로봇C, 랩뷰, 테트릭스 등의 플랫폼을 이용하여 가감속 제어를 구현하는 미션을 수행하였다. 그 미션은 정확하게 1m를 직진하는 것이었다. 미션을 해결하는 핵심은 전체 구간을 가속, 등속, 감속 구간으로 구분하는 것이었다. 수강생들은 선생님의 지도에 따라 등속구간을 최대한 줄이고, 가속 구간과 감속 구간을 동일하게 함으로써 효율적인 가감속 제어를 구현하였고, 1m를 정밀 주행하는데 성공하였다. 파일럿 프로젝트가 끝난 후, 선생님께서는 ‘가감속 제어’, ‘인공지능 학습 알고리즘서’, ‘로보암’, ‘센서 필터링’, ‘옴니휠러 효율 분석’, ‘효율적인 라인 트레이싱 기법’ 등의 다양하고 흥미로운 주제들을 제시하였다. 앞선 미션에서 ‘가감속 제어’에 흥미를 느꼈던 터라 다시 한 번 이 주제에 도전하기로 하였다.
각 주제를 소개하실 때마다 선생님께서 그 주제에 관련된 동영상을 보여주셨는데, 가감속 제어를 소개하실 때는 와인이 담겨진 잔을 안전하게 이동시키기 위한 두 대의 로봇, 즉 ‘싱글 액시스 로봇(Single Axis Robot :단축 이동 로봇)’을 보여주셨다. 이 중 하나의 로봇은 가감속 제어를 적용한 로봇이었고, 나머지는 등속 운동을 하는 로봇이었다. 두 로봇이 동시에 구동되는 과정에서 와인의 출렁임에는 많은 차이가 나타났다. 두 명으로 구성된 우리 팀은 최대 속력의 크기나 가감속 구간의 길이에 따라 수면이 어떻게 운동하는지 비교함으로써 액체를 안정적으로 운반하기 위해 적합한 가감속 제어 방법에 대한 연구를 진행하기로 하였다.
하드웨어 설계
두 대의 ‘싱글 액시스 로봇’을 구현하기 위한 가감속 제어 연구는 하드웨어 설계에 많은 노력을 요구하였다. 초기에는 레고 브릭만을 이용하여 로봇을 제작하였다. 그런데 캐터필러가 이동하는 과정에서 중력에 의해 현수선처럼 길게 늘어지는 것이 정확한 작동 및 제어에 큰 걸림돌이 되었다. 우리는 테트릭스를 이용하여 캐터필러 구조를 개선하고, 이를 통해 캐터필러의 출렁거림을 방지할 수 있었다. 컵이 담길 구조물을 제작하는 과정에서도 레고 브릭을 이용하였다. 하지만 컵이 이동해야하는 거리가 길고, 구조물과 컵의 무게가 생각보다 무겁기 때문에 ㅏ인드스톰의 모터로 로봇을 작동시키기에는 토크가 부족하다는 판단을 내리게 되었다.
| |
 |
|
| ▲ LEGO의 스프로킷(좌)과 TETRIX의 스프로킷(우) |
| |
 |
|
| ▲ LEGO의 캐터필러(좌)와 TETRIX의 캐터필러(우) |
따라서 테트릭스 모터와 스프로킷(톱니바퀴)을 이용하기로 하였다. 그러자 마인드스톰 모터를 사용할 때 보다는 더 큰 힘을 낼 수 있었지만, 이번에는 구조물을 고정시키는 레고 브릭들이 모터의 힘을 견디지 못하는 일이 발생하였다. 결국 모든 부품들을 테트릭스로 교체하여 로봇을 재설계 하였다. 또한, 기어 비를 사용함으로써 속력을 높일 수 있는 효과뿐만 아니라, 기존의 마인드스톰과는 달리 훨씬 더 안정적인 구조를 보였다.
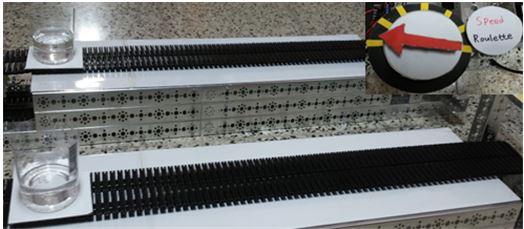
우리 팀이 설계한 로봇은 3중 지지 구조로 이루어져 매우 튼튼하다는 것이 가장 큰 장점이었다. 하층부는 전체의 무게를 지탱하는 역할을 하며, 중층부는 단단하고 두꺼운 종이를 이용하여 캐터필러가 처지는 것을 막을 수 있도록 제작하였다. 이러한 과정을 통하여 안정적으로 액체를 운반할 수 있는 구조를 고안해내었다. 또한 스피드 룰렛(speed roulette)이라는 독특한 버튼을 이용하여 상대 속력을 직접 조절함으로써 실험 및 관찰을 보다 용이하게 하였다.
| |
 |
|
| ▲ 가감속 제어를 적용한 Single Axis Robot의 최종 구조와 스피드 룰렛(오른쪽 상단) |
소프트웨어 설계
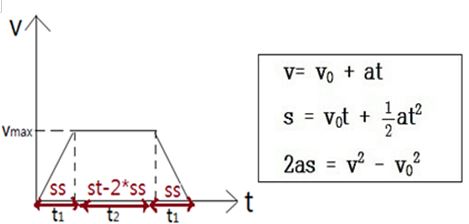
앞서 말했듯이 가감속 제어를 구현하는 핵심 아이디어는 가속, 등속, 감속 총 세 구간을 소프트웨어적으로 설계하는 것이다. 제일 먼저 가속과 감속을 하는 구간에서의 시간을 동일하게 하였는데, 아래 그림은 이를 도식화한 것이다. 그래프에서 ‘t1’은 등가속도 운동을 하는 시간이고, ‘t2’는 등속 운동을 하는 시간이다. ‘Vmax’는 로봇이 목표하는 최대 속력으로, 모터에 전달할 값(모터 값, -100 ~ 100)으로 정한다. 최대속력은 두 가지의 방법으로 구할 수 있다. 첫째, 속력-시간 그래프에서 가감속 제어와 등속 제어가 총 이동한 거리가 같다는 것을 이용한다. 둘째, 실험적으로 동일한 시간 동안 진행하는 속력을 측정한다. 하지만 통제가 어려운 수 많은 물리적인 변수 때문에 우리는 후자의 방법으로 진행하였다.
| |
 |
|
| ▲ 등가속도 그래프(좌)와 등가속도 운동 방정식(우) |
절대값이 100까지 있는 마인드스톰 모터의 속력과 실제의 우리가 일상생활에서 사용하는 속력은 단위가 다르다. 따라서 실험을 통하여 로봇의 모터 값과 이동 속력 사이의 비율(이하 모터비)을 구해서 로봇의 이동 속력을 계산해야 한다. 또 속력별 비율을 구하였는데, 속력별로 관성이나 마찰 등 여러 가지의 변수가 있기 때문이다. 이렇게 계산된 비율을 모터 값에 곱하게 되면 우리가 사용하는 단위의 속력으로 환산할 수 있다.
로봇의 전체 주행 거리를 ‘s’라고 할 때, 이는 등가속도 운동을 하는 구간과 등속 운동을 하는 구간으로 나눌 수 있다. 그리고 등가속도 운동 방정식을 이용하여 가감속 구간의 시간과 가속도를 구할 수 있다. 가감속 구간에서는 위에서 구한 시간 ‘t1’동안 로봇의 이동 속력이 일정하게 증가하게 되는데, 이때 모터 값은 속력을 모터비로 나눈 값과 같다. 등속 구간에서는 위에서 구한 시간 ‘t2’동안 로봇의 최대 속력으로 이동하게 된다.
가감속 제어를 적용한 로봇의 효율을 측정하기 위해서는 대조군이 필요한데, 이것이 바로 등속 제어 로봇이다. 등속 제어 로봇을 만들 때 가장 중요한 것은 가감속 제어를 적용한 로봇과 같은 시간 동안 이동해야 하는 것이다. 가감속 제어를 적용한 로봇의 총시간에 속력 ‘v’를 곱해야 하며, 위의 그래프와 동일한 면적을 이동하도록 속력을 계산한다. 이러한 과정을 거치고 나면 가감속 제어를 적용한 로봇과 같은 시간을 동일한 속력으로 이동할 수 있게 된다.
또 하나의 행복
이번 연구에서의 실험 결과, 작동 시간이 짧아질수록 로봇의 이동 속도가 증가하기 때문에 액체의 출렁거림이 커지는 것을 볼 수 있었다. 그러나 작동 시간이 짧아지더라도 등속 운동에 비해 가감속 운동을 할 때에 액체의 출렁거림이 적다는 것을 확인함으로써 가감속 제어의 효율을 증명할 수 있었다. 이를 통해 액체를 보다 안정적으로 운반하기 위해서 로봇의 이동속도를 높일수록 반드시 가감속 제어를 해야 할 필요가 있다는 것을 알 수 있었다.
우리는 이번 연구결과를 7월 중에 열렸던 교내 과학동아리 학술대회에서 시연하고 발표하였다. 그간 ‘로봇 공학 연구’ 프로젝트에 참여하였던 모든 팀은 완성도 높은 로봇으로 많은 사람들을 놀라게 하였다. 그 중 우리 팀의 가감속 제어 연구는 관람객들이 뽑은 ‘최고의 로봇’으로 선정되기도 하였다.
지난 5개월간의 연구를 통해 얻은 것은 가감속 제어의 효율에 대한 확신만이 아니었다. 연구 프로젝트를 수행하는 과정에서 같은 팀원, 다른 팀 친구들, 선생님을 비롯한 모든 사람들과 ‘로봇 지식’ 이상의 수없이 많은 것을 주고받은 느낌, 그 행복을 알게 된 점이 정말 소중한 경험이었다. ‘행복을 주다’라는 말보다는 ‘행복을 나누다’라는 말이 더 보편적으로 쓰이지 않는가? 내가 하고픈 것을 누군가와 함께한다는 것은 한쪽에게만 도움이 되는 것이 아닌 서로가 서로에게 정말 큰 도움이 된 다는 것을 깨닫게 되었다. 이러한 경험이 나 자신을 보다 더 성장하게끔 할 수 있는 커다란 한 걸음이 될 것이라고 굳게 믿는다.
참고영상 : https://www.youtube.com/watch?v=lcMZ8lXFajk . ▒ 오범석 경기북과학고 2학년 |

















