|
| |
 |
|
| ▲ KIST 달탐사연구사업추진단 강성철 단장은 지구와 다른 달의 극한 환경에서 탐사가 가능한 달탐사 로버의 기본적인 성능을 검증 할 수 있는 기술검증모델과 핵심 부품인 고체윤활 베어링 시제품을 개발했다고 16일 밝혔다. |
2020년에 예정된 달탐사 임무를 수행하기 위해 달에 착륙 예정인 달탐사 로버(rover)의 기술검증모델(POC, Proof of Concept)이 16일 공개되었다.
한국과학기술연구원(KIST, 원장 이병권) 달탐사연구사업추진단 강성철 단장은 지구와 다른 달의 극한 환경에서 탐사가 가능한 달탐사 로버의 기본적인 성능을 검증 할 수 있는 기술검증모델과 핵심 부품인 고체윤활 베어링 시제품을 개발했다고 밝혔다. 달은 지면이 울퉁불퉁하고 낮과 밤의 온도차이가 300도(-170도~+130도)에 이르는데다, 고진공 상태인 극한 환경이다.
KIST가 이번에 발표한 시험용 로버는 이러한 환경에서 탐사를 수행할 수 있는 로버의 기본 성능을 검증하기 위한 모델이다. 이날 공개된 KIST 로버는 미래창조과학부에서 주관하는 출연연 협력 융합연구사업인 “달탐사 로버 기반연구” 과제의 일환으로서 개발된 것이다.
그 동안 미국을 중심으로 개발되어 사용 중인 무인 탐사 로버는 비교적 온도 변화가 적고, 대기층이 존재하여 달보다 방사선 영향이 약한 화성의 환경을 감안하여 개발되었다. 달탐사 로버의 기술검증모델은 화성보다 극한 환경인 달의 조건을 지상에서 다양하게 설정하고, 지속적인 주행 및 탐사 시험을 통해 실제 달탐사 로버의 개발을 위한 기초 데이터를 수집하는 목적으로 개발되었다.
연구팀은 달 표면과 같은 극한 환경에서의 탐사를 위해 험한 지형에서의 주행 능력이 뛰어나고, 달 표면의 극고/극저온 환경(-170도~+130도)에서 동작이 가능하도록 열제어가 용이한 디자인으로 로버를 제작하는데 초점을 맞추었다. 달탐사 로버 기술검증모델은 여섯 개의 휠을 이용하여 안정된 주행이 가능하며, 두 개로 분리된 몸체가 체인 형태로 연결되어 있어 울퉁불퉁한 달의 지형에서도 지면과 접촉을 잘 유지하면서 안정되게 주행 할 수 있다. 이러한 로버의 설계는 KIST에서 개발되어 실용화된 위험작업로봇 롭해즈(ROBHAZ)의 수동형 더블트랙 설계(passive double-track mechanism)를 응용한 것으로, 한국 고유의 우주탐사 로버 설계안을 도출했다는 데 의의가 있다.
| |
 |
|
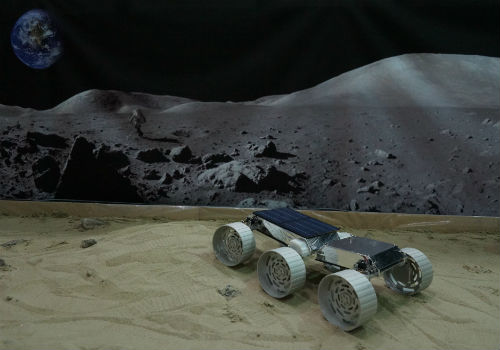
| ▲ 사진은 달탐사 로버가 지구를 바라보며 서 있는 장면을 연출해 보이고 있다. |
연구팀은 달 표면의 극저온/극고온 환경 및 고방사선 환경에서 안정적으로 동작을 수행 할 수 있도록, 구동 시스템인 모터와 제어기를 최대한 하나의 단일 몸체로 제작하여 배치해, 내부 열 제어 시스템이 최대한 간단하면서도 효과적으로 운용되도록 했다. 또한 진공도가 높은 달 환경을 고려하여 고체 윤활제를 적용한 로버용 베어링의 설계·제작 및 박막 코팅 기술을 함께 개발하여 달탐사 로버 구동부 개발에 핵심이 되는 우주환경 윤활 기술을 확보했다. 진공의 환경에서는 일반적으로 사용되는 액체 윤활제가 들어간 베어링의 활용이 원천적으로 불가능하기 때문에 고체 윤활제는 우주 시스템 개발을 위한 중요한 핵심 기술이다.
한편, 달탐사선에 태워질 최종 로버의 무게가 20kg 수준이기 때문에, 탑재 예정 장비의 무게 약7kg를 감안하여 현재 개발된 로버의 무게는 13kg로 개발되었다. 로버의 크기는 500mm x 700mm x 250mm, 등판각 30도, 최대 이동속도는 4cm/sec 이다.
이러한 극한 환경에서 원활하게 운용되는 달탐사 로버기술검증모델 시제품의 개발 기술과 고체 윤활제 베어링 기술은 국방, 극지환경, 사회 안전 및 위험 작업 로봇에 전수되어 직접 활용이 가능하고, 실생활에 도움이 되는 로봇의 성능개선에도 일조할 것으로 예측된다.
로버 기술검증모델 개발의 연구책임자인 이우섭 박사는 “이번에 개발된 시제품은 한국형 달탐사 로버의 개발을 위한 초기 모델이지만, 지금까지 축적된 대한민국의 필드 로봇 기술을 활용하여 빠른 시간 안에 한국 고유의 극한환경 로봇 기술로 월면(月面)을 다니면서 탐사를 수행하는 로버 개발이 가능할 것”이라고 밝혔다.
본 연구는 미래부에서 주관하는 출연연 협력 융합연구사업의 일환으로 수행된 달탐사 로버 기반 연구과제의 결과물로서, 달탐사 로버분야의 융합연구에는 KIST를 비롯하여 항우연, 생기원, 건설연, 재료연, 자동차부품연구원 6개 기관이 참여하고 있다.
|
















