|
싣는 순서 : 1. 착용형 로봇의 역사와 현재
2. 착용형 로봇의 용도에 따른 기술적 특징
3. 착용형 로봇에서 사용자 의도 파악(HRI: Human-Robot Interaction)이란?
3회에 걸친 연재의 마지막 컬럼에서는 착용형 로봇에서 제어의 핵심이라 할 수 있는 착용자 의도 파악 기술에 대하여 설명하겠다.
먼저 기술했던 바와 같이 착용형 로봇은 착용자가 직접 로봇과 접촉하여 함께 동작을 하며 착용자 목적에 맞는 근력을 지원하거나 지지하는 등의 특정 목표 작업을 수행하기 때문에 착용자의 동작의도를 정확히 파악하여 로봇을 제어해야 한다. 이는 또한 로봇 안정성 및 착용자의 상해 위험에도 직결되기 때문에 주의해서 적용하여야 한다.
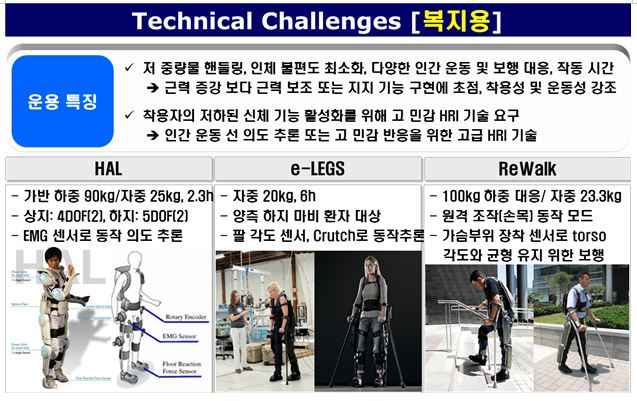
적용분야에 따라 HRI(Human-Robot Interaction)를 포함한 성능 면에서 기술적 특징은 아래 그림들에서 설명된 것 같이 구분될 수 있다.
| |
 |
|
| ▲ 국방용 착용로봇의 특징 |
| |
 |
|
| ▲ 산업용 착용로봇의 특징 |
| |
 |
|
| ▲ 복지용 착용로봇의 특징 |
1. HRI란?
대량 생산을 위한 자동화 시스템에서 주목받던 산업용 로봇은 현재 인간과 공존이라는 대 명분하에 인간의 생활공간 확장과 삶의 질을 높이는데 기여하기 위해 변신 중이다. 이러한 트랜드 변화에서 로봇이 그 주연을 담당하기 위해 예상되는 기술적 도전 분야로 구동기, 메커니즘, 제어 및 지능, 배터리 등을 들 수 있는데 해당 분야 중에 인간과의 상호작용에 관한 기술이 핵심 분야로 떠오르고 있다. 이유는 공존 및 밀접한 협력 관계에서는 인간의 예측할 수 없는 동작을 로봇이 이해하고 행동해야 하며 사용자의 로봇의 동작 특성 이해 부족으로 인한 예상하지 못한 충돌이나 로봇의 위험한 동작 발생 가능성이 높기 때문이다. 이러한 인간과 로봇의 상호작용에 관한 기술 분야를 HRI라 부르고 이는 크게 물리적 상호작용 pHRI(Physical Human-Robot Interaction)과 인지적 상호작용 cHRI(Cognitive Human-Robot Interaction)으로 나누어 질 수 있다.
HRI 관련 연구
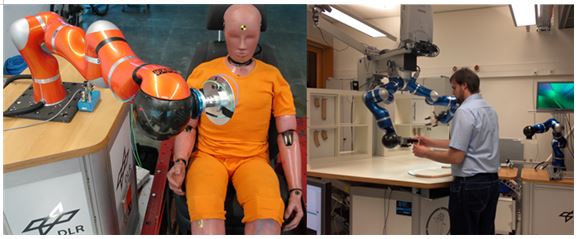
제약된 작업공간 내에서 인간과 로봇이 밀접하게 동작하고 상호 협력하기 위해서는 물리적인 충돌 문제를 해결하여야 한다. 기존의 산업용 로봇에 쓰이던 기술을 그대로 적용하기에는 여러 가지 어려움이 있기 때문에 이에 관한 연구가 활발히 진행되고 있다. 대표적인 연구로 EU(유럽연합)에서 진행하는 PHRIENDS와 SAPHARI가 있다.[2][3]
| |
 |
|
| ▲ [그림] (좌) 충격 테스트중인 로봇, (우) 사람의 힘으로 유연하게 조작되고 있는 로봇 |
HRI 중요성
로봇이 산업현장에서 차지하는 비중이 점점 더 커짐에 따라 불가피하게 사람과 로봇이 함께 일 해야 하는 상황이 수없이 발생한다. 이러한 환경에서 발생하는 안전사고는 우리에게 안전한 로봇에 대한 숙제를 던져준다. 실제로 2001년 29세의 작업자가 'Gantry Robot'과의 충돌로 얻은 부상 때문에 사망하고, 1999년에는 작업자가 육류 포장공장에서, 작동시키면 로봇이 위로 위치하게 되어있는 센서를 잘못 건드려 두개골 손상으로 사망하는 사건이 발생하였다. 이에 EU는 안전한 로봇에 대한 대규모 연구를 시작하게 되었다.[2]
| |
 |
|
| ▲ [그림] 프로젝트 PHRIENDS의 로고[2] |
PHRIEND(Physical Human-Robot Interaction : depENDability and Safety)
이 프로젝트는 사람과 로봇의 협력과 공존을 목적으로 하는, 믿을 수 있고 안전한 물리
적 상호작용을 가능케 하는 기술 구현을 목표로 한다. 프로젝트의 핵심 7개 목적은 다음과 같다. (1)새로운 구동기 개념 개발과 (2)연구용 프로토 타입 제작, (3)신뢰할 수 있는 관리 및 계획 알고리즘, (4)에러 및 사용자 실수로 인한 로봇의 불완전한 상태를 안전한 상태로 전이 시킬 수 있는 pHRI 제어 알고리즘, (5)위의 사항들을 포함하는 의미 있는 집약시스템 구축, (6)부품과 시스템의 실험적 품질 테스트, (7)국제단체의 로봇과 인간의 협력 작업에 대한 기초 확립에 기여[2]
| |
 |
|
| ▲ [그림] 프로젝트 SAPHARI의 로고[3] |
SAPHARI(Safe and Autonomous Physical Human-Aware Robot Interaction)
프로젝트 PHRIENDS에 이어 현재 진행중인 연구 프로젝트로 이 프로젝트에서는 Soft Robotics의 새로운 기술, 인지-회피기술과 안전한 pHRI을 결합하여 사람과 로봇의 협력을 실현할 계획이다. 또한 로봇시스템의 기능을 확장, 개선하고 자율성, 안전성, 강인성, 효율성, 사용성 등과 같은 연관된 기능을 추가로 개발하는 것이 목표이다. 해당 프로젝트의 핵심 8개 목적은 다음과 같다. (1)산업적/전문적 pHRI 사용에 대한 위험분석과 안전함을 모니터링 하는 방법, (2)가변 임피던스 구동기를 이용한 차세대 로봇 제작, (3)측정, 모델 기반의 제어방법, (4)넓은 공간에서 사람과 로봇의 모니터링 시스템, (5)사람의 활동을 학습 및 해석하는 방법, (6)반응 동작 개념 생성, (7)협력 작업 중에서 인체 회피 경로 생성, (8) 3개의 로봇 데모 [3]
2. 착용형 로봇에서 HRI
착용형 로봇은 개념상 로봇이 동작하는 동안 착용자와 지속적으로 물리적 접촉이 발생하기 때문에 인간과 로봇 사이에 보다 긴밀한 상호작용 이해가 필요하다. 만약 이의 문제로 착용로봇에서 오동작이 발생한다면 이는 착용자의 큰 부상으로 직결되기 때문에 상호작용 특성 기반 제어, 디자인, 메커니즘 구성에 각별한 주의를 기울여야 한다.
착용형 로봇에서 일반적인 제어목표는 착용자의 동작의도를 파악하여 그 의도 동작을 원활히 수행하고 동작에 따른 힘을 지원하는 것이다. 착용자의 동작에 관한 의도는 선 의도 파악과 후 의도 파악으로 나눌 수 있다. 선 의도 파악 기술로는 동작이 발생하기 전 인간의 뇌에서 발생하는 동작 지령 및 생각에 관해 뇌 신경사이에서 전기 신호를 측정하여 의도를 파악하는 방법, 근육 활성화 시 측정 가능한 전기 신호를 포착하여 동작이 활성화되기 전 상태를 인지하여 의도를 파악하는 기술 등이 대표적이다. 후자는 동작이 발생하면서 측정 가능한 위치, 속도, 가속도, 힘 등의 물리적인 변화량을 계측하여 동작 상태를 파악하는 것이다. 특히, 착용자가 로봇에 직접 가하는 힘을 측정하거나 로봇 구동기에 인가되는 부하를 전류나 전압으로 모니터링 하여 동작 의도를 측정하는 기술이 대표적이다 할 수 있다.
대표적인 pHRI 기반 의도추정 방법
힘 측정으로 의도를 파악하는 방법의 장점은 사람이 로봇에 가하는 힘 중 해당 관절의 회전방향에 가하는 힘만 따로 측정을 할 수 있고, 센서의 정보를 쉽게 활용할 수 있으며, 설치가 용이하다는 점을 꼽을 수 있다.반면, 단점으로는 착용자가 센서에 감지될 정도의 충분한 힘을 로봇에 직접 가해줘야 의도가 파악되고, 외부에서 작용하는 힘이 센서로 계측되어도 이를 착용자의 동작의도로 파악될 여지가 존재 한다.
| |
 |
|
| ▲ [그림] 인체 의도 증폭 제어 블록도[4] |
위 그림에 도시된 블록도의 의미를 해석하면 다음과 같다. 각 관절에 장착된 센서에 사람의 움직임으로 인해 가해지는 힘과 로봇의 동작으로부터 나오는 힘이 더해져 나온다. 후자를 역운동학으로 계산하여 인체 동작 힘을 분리해내고 증폭비를 곱하여 구동기 출력을 만든다. 또한 이론적인 로봇 모델의 움직임과 실제 로봇의 움직임의 다름을 보상하기 위해 두 모델의 각도차이에 증폭비를 곱하여 힘을 추가 보상한다. 위의 루프가 잘 동작이 된다는 가정 하에서 착용자와 로봇의 상호작용 힘은 0이 되고 착용자의 동작 의도 힘은 증강 구현되어 로봇이 수월하게 동작되어 질 수 있게 된다.
| |
|
|
| ▲ [그림] 인체 의도 증폭 제어 블록도[4] |
| |
 |
|
| ▲ [그림] Bleex의 구동기 구조도[5] |
대표적인 cHRI 기반 의도추정 방법
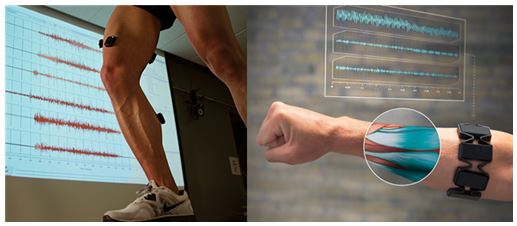
① EMG(Electromyography) 센서를 이용한 방식근전도 신호는 근육의 활동량을 전기신호로 측정하는 것이다. 이는 등척성 운동시 근전도 신호의 크기가 근력에 비례한다는 사실에 기반하여 동작 의도를 측정하는 것이다. 근전도 신호로 동작 의도를 파악하는데 있어서의 장점은, 사람이 로봇에 힘을 충분히 가하기 전에 해당 근육 부위에서 전기신호가 발생하기 때문에 실제 동작이 발생하기 전 동작 의도를 파악하는 것이 가능하다는 점과, 근육이 약하거나 없는 경우에도 의도 파악이 가능하다는 점을 들 수 있다. 단점으로는 센서로 측정된 근전도 신호에 잡음이 심하고 의도 파악을 위해 별도의 처리 과정이 요구 되는 점이다. 추가로 근전도 센서는 습식형과 건식형으로 나누어져 있으며 사람 피부에 직접 부착해야하기 때문에 착용성이 제한적일 수밖에 없고, 이로 인해 부착 위치가 지속적으로 바뀔 수 있다. 이 경우 요구부위 근육 센서의 초기화 작업을 진행해야 하며 근육에 피로가 쌓임에 따라 측정되는 신호의 크기가 저하되는 문제가 치명적이다.
| |
 |
|
| ▲ [그림] EMG 센서의 착용 예 [7][8] |
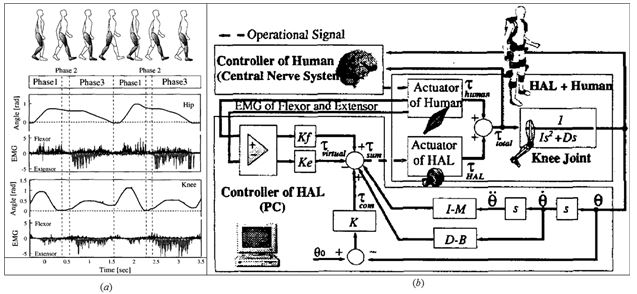
해당 HRI 기술을 적용한 대표적인 착용형 로봇으로 두 번째 컬럼에서 소개하였던 HAL을 들 수 있는데 그 제어 블록은 다음과 같다.
| |
 |
|
| ▲ [그림] (a) 보행시 측정되는 근전도 신호[9], (b) HAL의 제어 알고리즘[10] |
근육은 크게 관절을 굽혀주는 flexor 근육과 관절을 펴주는 extensor 근육으로 나눌 수 있고 이에 근전도 신호가 어떤 근육에서 얼마나 측정 되는지에 따라 운동 의도를 구분할 수 있게 된다. 그림 10.(a)는 사람이 보행할 때 측정되는 각 관절의 각도와 flexor와 extensor의 근전도 신호를 도시한다. 간단한 EMG 기반 HRI를 이용한 제어 방법을 기술하면, 보행 시에 반복되는 주기를 구간별로 나누어 의도 힘이 양수가 되는 구간, 음수가 되는 구간으로 나눈다. 이렇게 측정된 근전도 신호 각각에 증폭비 와 를 곱하고 이 두 신호 값을 더하여 가상 의도 힘을 얻는다. 이렇게 생성된 의도 힘을 착용 로봇 구동기에 인가하면 로봇을 착용한 사람의 인체 관절에 의도 힘을 증강해 주는 효과를 얻을 수 있게 된다.
② EEG 센서를 이용한 HRI 기술다음으로 EEG 센서를 이용한 착용자 의도 추정에 관해서 기술한다. 자세한 기술적인 내용은 이미 해당 전문 분야에서 많은 소개가 이루어지고 있기 때문에 본 컬럼에서는 자체 기술에 대한 내용은 생략하며 착용형 로봇 분야로의 적용을 위한 측면만 언급하도록 하겠다. 뇌전도 신호, 뇌파를 측정하여 동작 의도를 파악하는 방식의 가장 큰 장점 중 하나는 하반신 마비와 같은 장애를 가진 사람의 동작 의도까지도 파악하는 것이 가능하다는 점이다. 따라서 신체의 부분 절단 환자 등 운동 신경 전달에 문제가 있는 경우에도 동작 의도에 관한 추론이 가능하다. 하지만 뇌파만을 처리하여 동작 의도를 파악하게 되면 착용자의 의도에 대한 세부 동작 의도를 일일이 파악하는 것이 어렵고 착용자는 보다 더 정확한 의도 신호를 보내기 위해 지속적으로 집중해야만 하며 HW 측면에서는 뇌파 측정 센서의 착용성(습식 또는 건식 방식 존재)에 따른 정밀 측정 가능성(뇌파 측성 신호에 따른 요구 부위와 미소 신호 문제)이 요구된다. 추가로 뇌파를 처리하여 동작 의도로 반영하고 이를 로봇 운동으로 구현하는 면에서는 실시간성이 확보된 제어를 담보하기 어려운 문제가 예상된다.
| |
 |
|
| ▲ [그림] 프로젝트 MindWalker의 로고 및 착용로봇[9] |
이동의 제약은 가끔 하반신 마비와 같은 장애를 가진 사람들에게 있어서 사회생활을 제약하는 요소가 된다. 이 프로젝트의 목적은 보행에 장애가 있는 사람들에게 일상적 활동을 하게해주는 자동적으로 자연스러운 보행을 하게끔 해주는 것이다. 해당 연구에서 동작의도를 파악하는데 쓰인 방법은 크게 두 가지이다. 첫 번째로는 착용자가 쓴 EEG 센서 다발이 장착되어있는 모자로부터 동작 의도를 파악하는 방법이고, 두 번째로는 어깨 근육위에 EMG 센서를 부착하여 동작 의도를 파악하는 방법이다. 저자가 기 언급했던 바와 같이 EEG 기반의 동작 의도 파악 방법은 매우 어렵기 때문에 본 연구에서는 그 과정을 단순화 하였다. 착용자가 불빛이 들어오는 안경의 왼쪽, 또는 오른쪽을 보면 이에 활성화되는 뇌파를 측정하고 검출하여 착용자의 동작의도를 보행 또는 정지 의도로 받아들여 로봇을 걷거나 정지하게 만들었다. 추후 계획으로 연구팀은 안경과 같은 단순화 및 집중성을 높이기 위한 중간 HMI(Human-Machine Interaction) 디바이스에 의존하지 않고 생각만으로 동작 의도를 받아들여 걷는 것을 목표로 하고 있다 [10][11].
4. 재활 분야에서의 HRI
재활 훈련 및 치료 분야에서 적용되는 착용로봇의 제어 기술은 크게 착용자(환자)에 대한 운동 교시와 동 안정성 측면에 주안점을 두고 이에 관한 HRI에 기술에 집중한다. 일반인을 대상으로 하는 착용형 로봇의 의도 신호 추출 관점과 비교하여 보았을 때 다양한 동작 의도에 따른 로봇 동작 추종 보다는 착용자의 미세 의도 반응의 측정 또는 추론 되었을 때 일정한 속도와 운동 궤적으로 착용자를 움직이게 하는 쪽에 가깝다. 따라서 보다 일반인에 비해 동작에 관한 의도/비의도 보다 잘 구분하여 안정적으로 제어를 수행해야 하고 일반적으로 의도 측정에 관한 신호들이 보다 약하리라 예상되기 때문에 정밀한 HRI 처리 및 판단 기술이 요구 된다. 아래 그림 11을 통해서 현재 세계 각국에서 대표적으로 연구 개발되고 있거나 사용 중에 있는 착용형 로봇 기술을 적용한 재활 및 훈련 로봇 시스템들을 분류하였고 그 주된 제어 기술적인 접근 방법을 명시하였다.
| |
 |
|
| ▲ [그림] 착용형 로봇을 이용한 재활 분야 연구 사례 및 제어 기술 특징[1] |
5. 차세대 착용로봇 프로젝트
TALOS(Tactical Assault Light Operator Suit, 전략돌격용 경량의 작전 슈트)는 군사용 착용로봇 개발로서 2018년 실전배치를 목표로 연구진행중인 미국 국가 연구 과제이다. 이 프로젝트는 특수 사용자에게 가볍고 효율적이면서 방탄기능을 갖춤과 동시에 힘과 기타 능력을 더해주는 슈트를 개발하는 것을 목표로 한다. 상세 성능 목표로서 사용자의 피부 온도, 심박수, 자세, 탈수 정도의 모니터링 기술 개발, 내장된 센서를 통해 사용자 체내 온도를 모니터링 하고 히터와 쿨러를 통해 내부 온도를 조절하는 기능, 피아식별 기능 및 실시간 전투정보 습득 기능 기술 등이 있다. 최종 연구 개발 단계에서의 목표는 부상당한 사용자의 산소와 출혈까지 관리하는 것이라 한다. 윌리엄 맥레이븐 미 특수작전사령관은 어려운 문제 중 하나로서 슈트에 공급하는 에너지 문제를 언급하였다. 본 연구 과제는 아프가니스탄에서 특수 작전요원의 죽음으로서 한 요원이 사령관에게 한 더 나은 출입문 돌격 방법 개발 제안으로 촉발되었다고 한다. 현재 TALOS 개발 프로젝트는 56개의 기업, 16개의 정부기관, 13개 대학, 10개의 국립연구소등 전례 없는 대규모 공동연구로 진행된다.[12][13]
| |
 |
|
| ▲ [그림] 미국의 차세대 특수 작전용 착용로봇의 개념도[14] |
컬럼을 마치며
지금까지 착용형 로봇의 역사와 현재를 시작으로 기술적 특징, 의도파악 기술까지 약 3개월간에 걸쳐서 기획 컬럼을 진행하였다. 우리나라에서 착용형 로봇 기술에 관한 개발 역사는 로봇 선진 국가에 비해서 비교적 짧다 할 수 있지만 결과 수준으로 보았을 때 괄목한 성과를 얻은 것이 사실이다. 하지만 요소별 핵심 기술 면면히 보았을 때는 그 완성도가 떨어지고 독창성이 부족한 면이 없지 않아 있다. 로봇 분야는 시스템 운용이 최종 부산물이므로 자동차와 같이 완성된 시스템의 수없는 반복 운용을 통해 부분 개선이 이루어져야 하고 이와 더불어 최종 시스템의 성능 향상을 위한 핵심 요소들의 영향도 분석 및 특화된 요소 기술 개발이 요구된다. 현 기술 수준에서 단순 개발되어 있는 기성품조합만으로는 불가능에 가까운 기대치 또는 성능 목표 또한 존재하기 때문이다. 따라서 착용형 로봇 기술의 단순화 및 특화 적용 분야 발굴을 위한 노력을 선행하고 이와 동시에 핵심 요소 기술의 완성도를 높이며 기 개발되어 있는 시스템의 운용을 통한 개선 노력을 끊임없이 추구해야 한다.
저자는 본 컬럼을 통하여 착용형 로봇의 기술 소개뿐만 아니라 핵심 요소 기술 및 전용 가능성 있는 타 분야 후보 기술(소프트, 스마트 구동기 및 소재 등) 등까지 언급하려 하였으나 시간상 이번 기회에 기술하지 못한 것을 안타깝게 생각하고, 현재 착용형 로봇 및 관련 분야 연구를 지속적으로 수행하고 있기 때문에 향후 시간과 지면이 허락 된다면 보다 진보된 내용으로 후속 컬럼을 진행할 것을 약속하며 글을 맺도록 하겠다.
[자료 인용 출처]
[1] 양우성, “Technical Challenges in Development of Wearable Robots (for the Industry Field)”[2] http://www.phriends.eu/index.html[3] http://www.saphari.eu/
[4] Jean-Louis Charles Racine, University of California, Berkeley. Control of Lower Extrimity Exoskeleton for human Performance Amplification.
[5] Biomechanical Design of the Berkeley Lower Extremity Exoskeleton (BLEEX)
[6] http://www.think-tank.co.kr/173
[7] https://www.thalmic.com/en/myo/
[8] http://www.radiology.ucsf.edu/cort/capabilities
[9] Power Assist Method Based on Phase Sequence Driven by Interaction between Human and Robot Suit
[10] Power Assist Control for Walking Aid with HAL-3 Based on EMG and Impedance Adjustment around Knee Joint
[11] https://mindwalker-project.eu/
[12]http://blog.parts-people.com/2013/06/07/mindwalker-step-by-step-on-the-worlds-first-mind-controlled-exoskeleton/
[11]http://www.3me.tudelft.nl/en/about-the-faculty/departments/biomechanical-engineering/research/dbl-delft-biorobotics-lab/exoskeleton/mindwalker/
[13]http://www.defensemedianetwork.com/stories/adm-william-h-mcraven-updates-talos/[14]http://online.wsj.com/articles/u-s-military-turns-to-hollywood-to-outfit-the-soldier-of-the-future-1404527893
* 본 기사는 '월간로봇' 11월호에서도 볼 수 있습니다. 모든 표기는 '월간로봇'의 규정에 따랐습니다. |
















