| |
 |
|
| ▲레드쇼 심사위원들이 일반 부문 참가팀 발표를 듣고 있다. |
지난 22일~23일 ‘KRoC 2024’가 열리고 있는 2층 팀버홀 3에서는 ’레드쇼(RED:Robot Engineering & Design Show)‘가 열렸다. 레드쇼는 실세계의 문제를 공학적으로, 디자인적으로 해결하기 위해 창작한 로봇 및 디자인 작품들을 시연함으로써 창의적 아이디어를 발굴, 공유, 홍보하기 위한 행사로 한국로봇산업진흥원과 한국로봇학회가 공동으로 주최하는 행사다.
| |
 |
|
| ▲RED Show 일반 부문 최우수상을 차지한 ‘비정형 고하중 물체 파지를 위한 직조 구조 소프트 그리퍼' |
| |
 |
|
| ▲학부생 부문 최우수상을 차지한 ‘4족 보행 로봇을 위한 능동 가변 강성 및 변속 메커니즘’ |
올해 행사에서 RED Show 일반 부문 최우수상은 ‘비정형 고하중 물체 파지를 위한 직조 구조 소프트 그리퍼'를 출품한 한국과학기술연구원 강경지 최준필 강규림 송가혜, 한국과학기술원 이대영 팀, 학부생 부문 최우수상은 ‘4족 보행 로봇을 위한 능동 가변 강성 및 변속 메커니즘’을 출품한 서강대 허정우 송한결 정석환(지도교수) 팀이 차지해 한국로봇산업협회장상과 상금 100만원을 받았다.
| |
 |
|
| ▲한국로봇산업진흥원 손웅희 원장(사진 오른쪽)이 2024 RED Show 일반 부문 최우수상 수상 팀 강경지 연구원에게 시상 후 기념촬영 하고 있다. |
| |
 |
|
| ▲한국로봇산업진흥원 손웅희 원장(사진 오른쪽)이 2024 RED Show 학부생 부문 최우수상 수상 팀 허정우 학생에게 시상 후 기념촬영 하고 있다. |
이번 행사에 출품된 제품은 일반 부문에서 △고방사선구역 방사선량 측정 비행로봇, △고속 가변 강성 피드백이 가능한 자장 재밍 텐저블 촉각 디스플레이 △LLM 연동 자율주행 휴머노이드 웰컴로봇 에이미(AIMY) △SNU-아바타 로봇 핸드 : Dexterous Robot Hand with Prismatic Four-Bar Linkage for Versatile Daily Applications △오리가미 링크를 사용한 스스로 전개되고 접히는 공압식 텐트(Self Deployable and foldable Pneumatic Tent Using Origami Linkages) △비정형 고하중 물체 파지를 위한 직조 구조 소프트 그리퍼 △뱅가드(Vanguard:다층 실내 환경에서 계단 극복이 가능한 자유주행 궤도형 로봇 △원천적으로 안전한 신속 비대면 비강 자동 검체 추출 로봇 시스템 △A Snake-like mobile robot that mimics snake locomotion to explore complex terrains △Medi-InjectBot (소프트 로보틱스 그리퍼를 적용한 스마트 자동 주사 시스템 △Developement of Four Omni-wheeled Mobile robot with Linear motion △손 절단환자를 위한 촉각 구현 조작 지능 탑재 로봇 의수 △내 손처럼 조작 가능한 의수 : 근접 센서 기반 의수 잡기 지능 구현 △기어 구름 관절이 적용된 케이블 구동기반 경량 팔레타이징 로봇 △심층강화학습 기반 사족보행 로봇의 다양한 행동 제어 기술 개발 등 15개 팀이 참여했다.
| |
 |
|
| ▲한국로봇산업진흥원 손웅희 원장(사진 가운데)이 2024 RED Show 일반 부문 우수상 수상 팀에게 시상 후 기념촬영 하고 있다. 사진 왼쪽부터 한국과학기술원 이승현, 한국과학기술연구원 권성일, 한국과학기술연구원 이호석, 서울대 유성렬 연구원 |
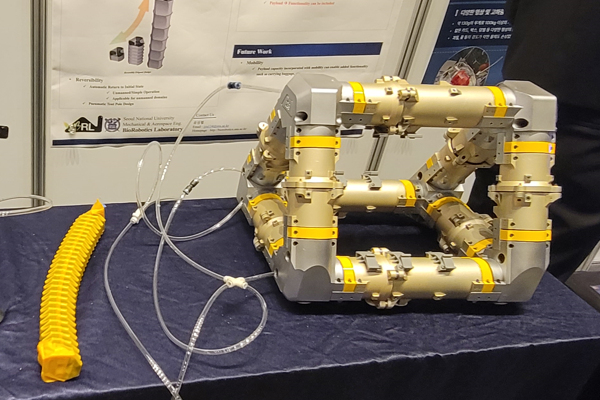
우수상은 △'오리가미 링크를 사용한 스스로 전개되고 접히는 공압식 텐트(Self Deployable and foldable Pneumatic Tent Using Origami Linkages)'를 출품한 서울대 유성렬 안상준 조규진(지도교수) △'원천적으로 안전한 신속 비대면 비강 자동 검체 추출 로봇 시스템'을 출품한 한국과학기술연구원 이호석 안충길 양성욱 이종원, 한국기술교육대 김용재 △'A Snake-like mobile robot that mimics snake locomotion to explore complex terrains'를 출품한 한국과학기술연구원 권성일 하준형 인체카라 세르다르 △'심층강화학습 기반 사족보행 로봇의 다양한 행동 제어 기술 개발'을 출품한 한국과학기술원 이승현 NAHRENDRA I Made Aswin 이현우 이동규 명현(지도교수) 등 3개 팀이 차지해 각각 한국로봇산업진흥원장상과 상금 50만원을 받았다.
| |
 |
|
| ▲우수상을 수상한 서울대 조규진 교수 연구팀에서 출품한 '오리가미 링크를 사용한 스스로 전개되고 접히는 공압식 텐트' |
학부생 부문에서는 △그리퍼의 개발과 다양한 재밍 백 형상 및 보조 밴드를 통한 그리핑 강도 향상 실험 △브레이킹 시스템을 이용한 엑소-스켈레톤 햅틱 글로브 △수상 태양광 무선 충전 플랫폼 △인간과 로봇의 라포형성을 바탕으로 성경구절 추천 로봇 △4족 보행 로봇을 위한 능동 가변 강성 및 변속 메커니즘 △건설현장 알폼 층 내 이송을 위한 군집 로봇의 복합경로 계획법 △4절 링크 구조를 이용한 휠레드 레그드 로봇(Wheeled Legged Robot) 설계 등 7개 팀이 참여했다.
| |
 |
|
| ▲한국로봇산업진흥원 손웅희 원장(사진 오른쪽)이 2024 RED Show 학부생 부문 우수상 수상 팀 서울과기대 박재현, 한양대 팀에게 시상 후 기념촬영 하고 있다. |
우수상은 △‘브레이킹 시스템을 이용한 엑소-스켈레톤 햅틱 글로브’를 출품한 한양대 이원형 김채원 주영찬 허재영 문찬혁 서태원(지도교수), △'4절 링크 구조를 이용한 휠레드 레그드 로봇(Wheeled Legged Robot) 설계'를 출품한 서울과기대 김용진 박재현 권기성 한성모(지도교수) 두 팀이 차지해 각각 한국로봇산업진흥원장상과 상금 50만원을 받았다. |
















