|
[강원도 평창. 사진=박경일 기자] 제19회 한국로봇종합학술대회가 열리고 있는 강원 평창 휘닉스파크 22일 현장 스케치 사진을 게재한다. 이날 학술대회 현장에선 후원기업들이 참여 부스를 마련해 최신 로봇 솔루션을 선보였다. 레드쇼 현장에도 많은 참가자들이 방문해 관심을 나타냈다.
| |
 |
|
| ▲ 코라스로보틱스 |
| |
 |
|
| ▲ 벡터코리아 |
| |
 |
|
| ▲ 레인보우로보틱스 |
| |
 |
|
| ▲ 로보티즈 |
| |
 |
|
| ▲ 로아스 |
| |
 |
|
| ▲ 에이딘로보틱스 |
| |
 |
|
| ▲ 리골코리아 |
| |
 |
|
| ▲ NOKOV모션캡쳐시스템 |
| |
 |
|
| ▲ 엔젤로보틱스 |
| |
 |
|
| ▲ 현대자동차 Robotics Lab |
| |
 |
|
| ▲ 로보티즈 |
| |
 |
|
| ▲ 스위스아미에트(파울하버) |
| |
 |
|
| ▲ 원익로보틱스 |
| |
 |
|
| ▲ 아비커스 |
| |
 |
|
| ▲ 메크마인드로보틱스 |
| |
 |
|
| ▲ HD현대로보틱스, HD한국조선해양 |
| |
 |
|
| ▲ 제이엔텍 |
| |
 |
|
| ▲ 헌정세션 (오준호 교수) |
| |
 |
|
| ▲ 특별세션 엣지 브레인 프레임워크기반 스마트 공장의 주행 |
| |
 |
|
| ▲ 특별세션 재난대응로봇 |
| |
 |
|
| ▲ 특별세션 착용형 로봇 및 특화 구동모듈 기술 개발 |
| |
 |
|
| ▲ 포스터 세션 |
| |
 |
|
| ▲ 포스터 세션 |
| |
 |
|
| ▲ 레드쇼 시연 |
| |
 |
|
| ▲ 레드쇼 시연 |
| |
 |
|
| ▲ (레드쇼 시연) 기어 구름관절이 적용된 케이블 구동기반 경량 팔레타이징 로봇 |
| |
 |
|
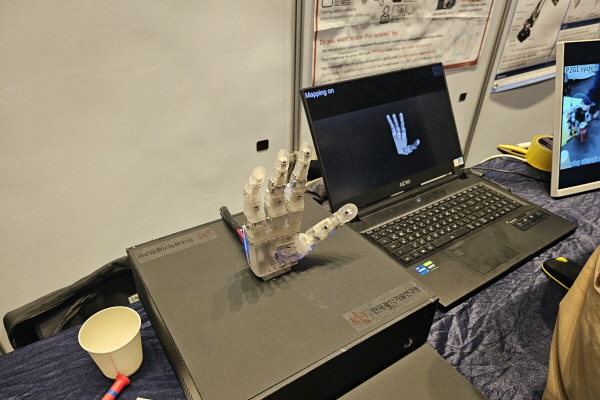
| ▲ (레드쇼 시연) 내 손처럼 조작 가능한 의수: 근접센서 기반 의수 잡기 지능 구현 |
| |
 |
|
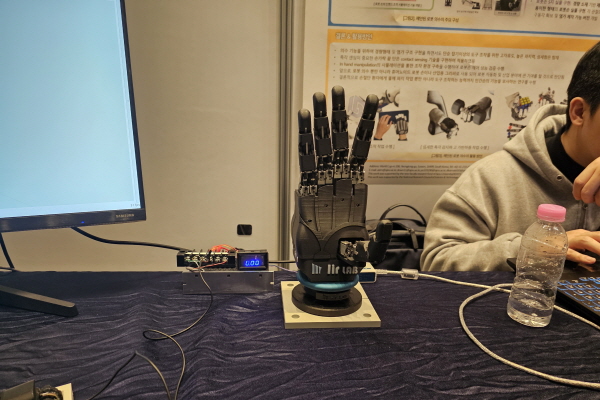
| ▲ (레드쇼 시연) 손 절단환자를 위한 촉각 구현 조작 지능 탑재 로봇 의수 |
| |
 |
|
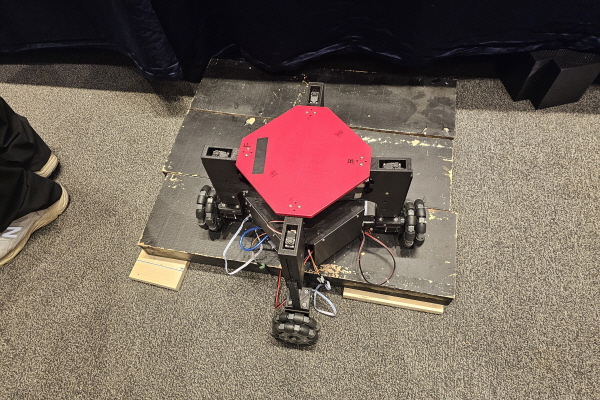
| ▲ (레드쇼 시연) Developement of Four Omni-wheeled Mobile robot with Linear motion |
| |
 |
|
| ▲ (레드쇼 시연) A snake-like mobile robot that mimics snake locomotion to explore complex terrains |
| |
 |
|
| ▲ (레드쇼 시연) 원천적으로 안전한 신속 비대면 비강 자동 검체 추출 로봇 시스템 |
| |
 |
|
| ▲ (레드쇼 시연) 비정형 고하중 물체 파지를 위한 직조 구조 소프트 그리퍼 |
| |
 |
|
| ▲ (레드쇼 시연) Self Deployable and Foldable Pneumatic Tent Using Origami Linkages |
| |
 |
|
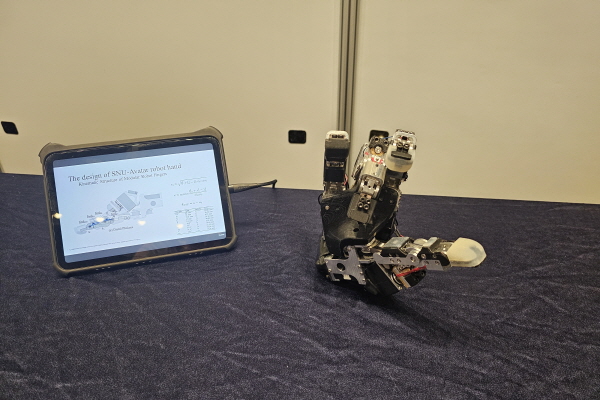
| ▲ (레드쇼 시연) Dexterous Robot Hand with Prismatic Four-Bar Linkage for Versatile Daily Applications |
| |
 |
|
| ▲ (레드쇼 시연) LLM연동 자율주행 휴머노이드 웰컴로봇 에이미(AIMY) |
| |
 |
|
| ▲ (레드쇼 시연) 고속 가변 강성 피드백이 가능한 자장 재밍 텐저블 촉각 디스플레이 |
| |
 |
|
| ▲ (레드쇼 시연) 뱅가드(Vanguard): 다층 실내환경에서 계단 극복이 가능한 자율주행 궤도형 로봇 |
|
















