美 조지아텍, 벌레ㆍ뱀 닮은 '팔다리 없는 로봇' 개발'사이언스 로보틱스'에 연구 성과 발표
승인 2024.02.16 17:06:53
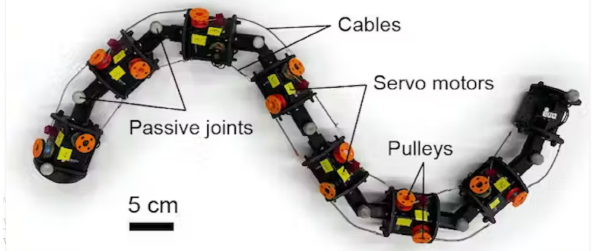
▲ 로봇의 구조
美 조지아텍 연구팀이 벌레 또는 뱀처럼 '팔다리가 없는 로봇'을 개발했다고 밝혔다. 이 로봇은 다양한 센서에 의존하기보다는 '기계적인 지능'을 통해 이동하고 장애물을 회피할 수 있다.
이 로봇은 벌레나 뱀처럼 꿈틀대면서 장애물을 극복할 수 있어 향후 재난 상황에서 생존자를 찾거나 붕괴된 건물 더미 속을 탐색하는 데 활용될 수 있을 것으로 기대되고 있다.
연구팀에 따르면 로봇공학자들은 수십년동안 뱀이나 벌레처럼 팔다리가 없는 로봇을 개발하기 위해 노력해왔다. 팔다리가 없는 로봇은 다리 로봇이나 바퀴달린 로봇, 그리고 인명 구조대원들이 접근하기 힘든 비좁은 공간을 탐색할 수 있는 능력을 갖추고 있다. 하지만 지금까지 개발된 팔다리 없는 대부분 로봇들은 험한 지형에서 민첩성과 융통성을 갖고 이동하는 데 어려움을 겪고 있다. 아주 작은 선충인 예쁜꼬마선충(Caenorhabditis elegans, round worm) 조차도 비교적 단순한 신경계를 갖고 있지만 어려운 물리적 환경을 헤쳐나갈 수 있는 것과는 대조적이다.
조지아텍 연구팀은 이 문제에 대한 해답을 찾기 위해 신경과학 대신 '바이오역학(biomechanics)'에 주목했다. 로봇공학자들은 일반적으로 로봇의 몸에 부착돼 있는 센서들로부터 정보를 얻고, 이 정보를 바탕으로 동작을 만들어내는 알고리즘을 설계한다. 이런 알고리즘들과 시스템들은 복잡성을 띠고 있다.
연구팀은 이같은 복잡한 알고리즘보다는 벌레와 뱀의 움직이는 동작과 유사한 기계적인 메커니즘을 활용해 로봇 모델을 고안했다. 센서나 계산 과정없이도 장애물을 극복할 수 있는 기계적인 제어 접근 방식을 통해 로봇 시스템을 단순화한 것이다. 동물들은 자신의 움직임을 통제하기 위해 뉴런, 즉 뇌 세포와 말초 신경에만 의존하지 않는다. 예를 들어, 근육의 탄력성과 같은 몸의 물리적인 특성도 활용한다. 계산 시스템이 수학 법칙에 의해 지배되는데 반해 기계 시스템은 물리학에 의해 지배된다.
이같은 과제를 달성하기 위해 과학자들은 알고리즘을 설계하거나 물리 시스템을 신중하게 설계한다. 예를 들어, 팔다리가 없는 로봇과 동물들은 몸의 한 부분을 좌우로 구부림으로써 특정 지형을 통과할 수 있다. 이 같은 동작은 ‘파동(undulation)‘으로 불린다.
로봇공학자들은 로봇의 재료, 모터의 배열과 강도 등을 신중하게 선택함으로써 로봇이 장애물과 충돌시 자연스럽게 회전으로 이어지는 체형을 만들어 낼 수 있다. 이를 통해 ’기계 지능(mechanical intelligence)‘을 구현할 수 있다.
▲ 로봇의 상세 구조
조지아텍 연구팀은 뱀과 벌레에서 영감을 받아 기계적인 지능을 갖춘 팔다리 없는 로봇인 ’MILR(mechanically intelligent limbless robot)‘을 개발했다. MILR에는 각각의 관절을 좌우, 양쪽으로 당기는 두 개의 독립적으로 제어되는 케이블이 있다. 연구팀은 이 방법을 사용해 로봇이 주변 환경을 감지하지 않고도 능동적으로 신체 자세를 변경하면서 장애물 주변을 자발적으로 이동할 수 있다는 것을 발견했다.
이번 연구는 로봇 전문 학술지인 '사이언스 로보틱스'에 게재됐다.(논문 제목:Mechanical intelligence simplifies control in terrestrial limbless locomotion)