이탈리아기술연구원, 덩굴식물처럼 스스로 자라는 소프트 로봇 개발‘사이언스 로보틱스’에 연구 논문 발표
승인 2024.01.23 14:34:00
▲ 스스로 자라는 소프트 로봇
이탈리아기술연구원(IIT:Istituto Italiano di Tecnologia)과 프랑스 몽펠리에대학 공동 연구팀이 3D 프린팅 기술을 활용해 스스로 자라는 뱀형 로봇을 개발했다고 19일 밝혔다. 이 로봇은 덩굴식물처럼 스스로 자라난다.
연구팀은 이번 연구 성과를 로봇 전문 학술지인 ‘사이언스 로보틱스’에 발표했다.(논문 제목:A growing soft robot with climbing plant–inspired adaptive behaviors for navigation in unstructured environments)
연구팀은 로봇공학과 3D 프린팅 기술을 결합해 덩굴식물처럼 자라는 새로운 종류의 소프트 로봇 ‘필로봇(FiloBot)’을 개발했다고 밝혔다. 이 로봇은 빛이 있는 쪽을 향해 자라거나 중력을 거슬러 자라게 프로그래밍할 수 있다. 이 로봇은 뱀 모양을 하고 있으며, 머리 부분이 회전하면서 자라난다.
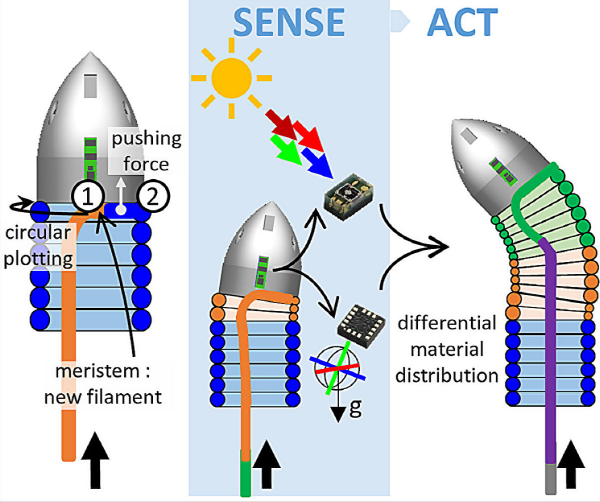
▲ 필로봇 머리 부분의 구조
필로봇은 머리 부분에 3D 프린터 잉크(플라스틱)를 담고 있는 관(tube)을 갖고 있다. 머리는 회전하면서 로봇 몸체를 추가로 3D 프린팅한다. 로봇의 반대쪽 끝에는 잉크저장소를 담고 있는 받침대, 펌프, 그리고 전원이 존재한다.
머리 내부에 있는 전자장치는 머리 외부의 센서로부터 오는 신호에 반응한다. 센서로부터의 입력은 프린터의 출력을 조절하는 데 사용된다. 프린터는 회전 속도와 공급되는 잉크의 양을 빠르게 또는 느리게 조절할 수 있으며, 성장의 방향도 결정할 수 있다.
연구팀은 눈사태 또는 산사태의 가능성을 추정하고, 오염 지역을 점검하는 등 자연 환경을 관찰하거나 상호작용하는 데 필로봇을 활용할 수 있을 것으로 기대하고 있다.