美 노스캐롤라이나주립대, 타이어처럼 구르고, 팽이처럼 도는 소프트 로봇 개발국립과학원 회보에 연구 논문 발표
승인 2024.01.11 17:33:30
타이어처럼 구르고, 팽이처럼 회전하며, 달 우주선 처럼 원형 궤도를 따라 움직이는 소프트 로봇이 개발됐다.
美 노스캐롤라이나주립대(NCSU) 연구팀은 앞으로 구르기, 레코드판처럼 회전하기, 중심점 주위 궤도를 따라 이동하기 등 여러 동작을 동시에 수행할 수 있는 새로운 소프트 로봇 디자인을 개발했다고 밝혔다.
사람이나 컴퓨터의 제어 없이 동작 가능한 이 소프트 로봇 장치는 미지의 환경을 탐색하고 매핑 작업을 하는 데 활용될 수 있을 것으로 기대된다.
'트위스트 링봇(twisted ringbots)'으로 불리는 이 소프트 로봇은 파스타를 만드는 데 쓰이는 로티니 면(rotini noodle)처럼 꼬불꼬불한 형태의 액정 탄성체로 만들어졌다. 끝 부분이 합쳐져 팔찌같은 고리를 형성한다. 리본 모양의 로봇들을 주변 공기보다 뜨거운 섭씨 55도 이상의 표면에 놓으면,리본의 표면에 닿는 부분은 수축하고, 표면에 닿지 않는 부분은 그대로 있다. 이는 구르는 동작을 유도하고, 표면이 따뜻해질수록 로봇은 더욱 빨리 구르게 된다.
이번 연구 성과는 미국 국립과학원 회보에 게재됐다.(논문 제목:"Defected Twisted Ring Topology For Autonomous Periodic Flip-Spin-Orbit Soft Robot,")
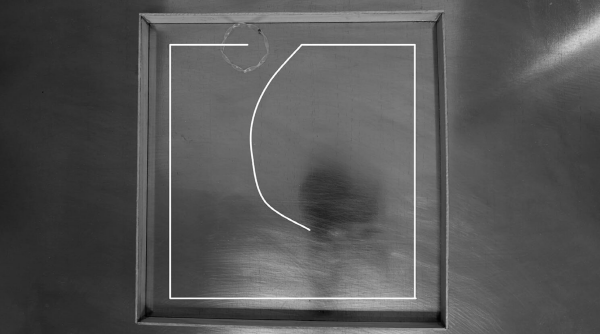
트위스트 링봇은 턴테이블 위의 레코드처럼 중심축을 따라 회전할 수 있으며 전진하면서 중심점을 중심으로 궤도를 이동하며, 기본적으로 큰 원을 그린다. 연구팀은 "이 같은 행동은 미지의 환경을 지도화하는 데 특히 유용할 수 있다“고 설명했다.
트위스트 링봇은 컴퓨터나 인간의 개입에 의해 동작하는 것이 아니라, 로봇 자체의 구조적인 특성, 즉 자신의 물리적 지능(physical intelligence)에 의해 동작한다. 연구팀은 이 장치의 기하학적 구조를 조작함으로써 트위스트 링봇의 동작을 미세 조정할 수 있다고 설명했다. 연구팀은 개념 증명 테스트에서 트위스트 링봇이 다양한 닫힌 공간의 윤곽을 따라 이동할수 있다는 것을 보여주었다.