美 카네기멜론대, 실내 동적 환경 지원하는 드론 항법시스템 개발터널 내에서 성능 시험 실시
승인 2024.01.05 17:22:53
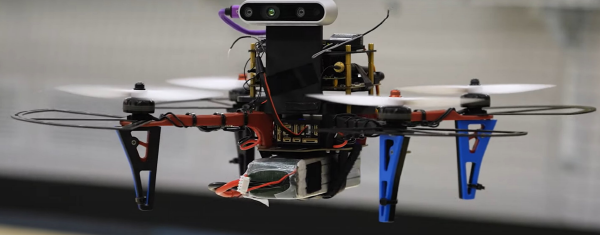
미국 카네기멜론대(CMU) 겐지 시마다(Kenji Shimada) 교수팀이 불확실성이 높은 실내 환경에서 장애물과 충돌하지 않고 자율비행할 수 있는 드론 항법 기술을 개발했다고 밝혔다.
이 항법 시스템은 터널처럼 GPS 신호가 도달하지 않는 실내 환경에서 드론이 사람 또는 움직이는 장애물과 충돌하지 않고 안정적으로 비행할 수 있도록 지원한다.
CMU 연구진에 따르면 드론이 수색 구조 임무에서 생명을 구하거나, 안정적으로 소포를 배달하는 임무를 수행하기 위해선 사고 없이 동적 환경을 탐색할 필요가 있다. 무인 항공기는 열린 공간에선 비교적 안정적으로 비행할 수 있지만, GPS 신호가 없는 실내 환경에선 자율비행이 쉽지 않다. 게다가 장애물이 한 장소에 머물러 있지 않고 계속 움직인다면 예측 불확실성은 더욱 높아진다.
겐지 시마다 교수팀은 일본 톱라이즈(Toprise)와 오바야시가 후원한 프로젝트의 일환으로 일본 터널 건설 현장 내에서 드론이 노동자들과 충돌을 피하면서 터널 내부를 탐색하는 임무를 맡았다.
시마다 교수는 "기업들은 젊은 사람들이 더 이상 위험하고 육체적인 노동을 기피한다는 것을 인식하고 있다“며, ”그 공백을 채우기 위해 로봇공학에 투자하고 있다"고 말했다.
연구팀이 활용한 드론은 터널 굴착면의 3D 기하학적 구조를 측정할 수 있다. 이 정보는 건설업자에게 사람들을 위험에 빠뜨리지 않고 터널의 어떤 부분이 완전하고, 어떤 부분이 개선돼야하는 지를 알려준다.
이번 프로젝트에 참여하고 있는 박사과정 학생 즈판 슈(Zhefan Xu)는 "우리가 아는 한, 건설 중인 동적인 터널 환경에서 자율 드론으로 3D 스캔을 한 것은 이번이 처음이다“라고 말했다.
연구팀은 터널에서 일하는 사람들이나 움직이는 물체의 경로를 예측하기 위해 3D 하이브리드 지도를 사용했다. 그리고 정적인 환경을 고려하면서 동시에 동적인 장애물을 추적하는 실시간 시스템을 도입했다. 이를 통해 움직이는 드론이 물체와의 충돌을 방지하기 위해 실시간 계획을 고려하도록 기존의 알고리즘을 개선했다. 이 같은 조합은 드론들이 충돌이 발생할 수 있는 위치를 근사치에 가깝게 예측하고, 충돌을 예방하도록 지원한다.