|
젊은 로봇 공학자(Young Robot Engineer)' 코너는 한국로봇학회와 로봇신문이 공동으로 기획한 시리즈물로 미래 한국 로봇산업을 이끌어 갈 젊은 로봇 공학자를 발굴해 소개하는데 있다.
65번째 인터뷰는 KAIST 항공우주공학과 이대영 교수다. 이 교수는 1988년생으로 포항공대 기계공학과를 졸업하고, 서울대 기계공학과에 진학, 2013년 석사, 2017년 2월 박사학위를 받았다. 졸업 후 2018년 12월까지 서울대 첨단 기계 및 디자인연구소와 소프트 로보틱스 연구센터 선임연구원을 거쳐 2019년 1월부터 2021년 8월까지 미국 하버드대학교 마이크로로보틱스연구실에서 박사후 연구원으로 근무했다. 2021년 10월부터 현재까지 KAIST 항공우주공학과에서 조교수로 재직하고 있다.
2014년 5월 IEEE RAS ICRA 2014 최우수 논문상, 2014년 5월 한국정밀공학회 최우수논문상, 2016년 4월 제1회 로보소프트 그랜드챌린지 대상, 2014년 5월 한국정밀공학회 최우수논문상, 2017년 2월 한국HCI학회 컨퍼런스 최우수논문상, 2017년 2월 제23회 삼성휴먼테크논문상 기계공학 부분 3위, 2018년 11월 한국기계공학회 선정 올해의 10대 기계기술 선정 영예를 안았다.
주요 관심 분야는 종이접기공학, 전개형 구조, 우주로보틱스, 재구성가능한 로봇기술, 생체모방형 소프트로보틱스 메카니즘, 스마트 머티리얼 등이다.
Q. 최근하고 계신 연구가 있다면 소개 부탁드립니다.
저는 종이접기 기반 로보틱스라는, 대부분의 다른 로봇 연구자분들께는 생소할 수 있는 주제로 연구를 해왔습니다. 그리고 최근에는 종이접기 설계 방법을 다양한 우주로봇 시스템에 접목하는 연구를 수행하고 있습니다.
종이접기와 로보틱스라는 어울리지 않아 보이는 단어의 조합에 의아하실 분이 많을 것 같습니다. 그래서 종이접기 기반 로보틱스에 대해 간단하게 소개를 드리려고 합니다. 우리가 아는 종이접기는 종이학이나 종이배처럼 종이를 이리저리 접어 원하는 모양을 만드는 것입니다. 하지만 조금만 더 확장해서 생각해보면 치킨 상자나 택배 상자와 같은 것들도 종이접기의 영역으로 생각할 수 있습니다. 평소에 큰 의식 없이 사용하기에 특별함을 느끼지 못할 수도 있지만, 사실 치킨 상자에는 복잡한 기구학적 움직임이 포함되어 있습니다. 그리고 우리는 이를 이용하여 뚜껑을 잠그고 소중한 치킨을 안전하게 보관하고, 또 상자가 필요 없을 때는 얇게 접어서 편리하게 치울 수 있습니다. 보통 기계 관절 구조는 핀 베어링 등 다수의 요소가 필요합니다. 하지만 치킨 상자의 예시에서 볼 수 있듯이 종이라는 물질의 변형을 이용하여 접힘을 만들고 이를 관절 구조로 활용하면, 아주 단순한 구성으로 비슷한 효과를 낼 수 있습니다. 이러한 원리를 적극적으로 활용하여 설계한 로봇을 종이접기 기반 로보틱스로 분류합니다.
물론 실제 로봇 제작에 종이를 사용하지는 않습니다. 그 보다는 필름이나 특수 직물 등의 질기고 유연한 재료 위에, 금속 혹은 플라스틱과 같은 단단한 조각들을 특정 패턴으로 붙여서 구조를 만듭니다. 여기서 유연한 재료 부분은 접히는 선이, 단단한 조각이 붙어 있는 부분은 접히지 않는 면이 됩니다. 우리가 아는 종이접기와 재료 구성은 다르지만, 재료의 변형을 기반으로 형상을 변화시킨다는 기본 원리는 같습니다.
이러한 설계 방법은 몇 가지 독특한 장점을 제공합니다. 첫째로는 그 구조가 아주 단순하여 스케일을 변화시키기 쉽습니다. 이 장점은 주로 초소형 로봇을 만들 때 많이 활용됩니다. 둘째로 기존의 방법으로는 만들기 어려웠던 복잡한 기구학 메커니즘의 구현을 가능하게 합니다. 이는 제 연구 중 하나인 가변형 바퀴에 활용된 장점입니다. 셋째로 메커니즘의 무게를 크게 줄일 수 있습니다. 종이접기 구조를 사용하면 필요로 하는 부품의 숫자와 부피를 대폭 줄일 수 있고, 이는 전체 시스템을 아주 가볍게 구성하는 데 큰 도움을 줄 수 있습니다. 이러한 특징은 UAV(무인비행기)나 우주 시스템과 같이 무게가 중요한 어플리케이션에서 중요한 장점이 될 수 있습니다.
앞서 이야기해 드린 것처럼, 최근에는 이러한 설계 방법을 우주로봇 시스템에 접목하려 하고 있습니다. 지금 우주에 도달하는 방법은 로켓밖에 없습니다. 우주에 쏘아 올리는 모든 것은 로켓의 작은 화물 공간 안에 수납되어야 하며, 그래서 접어서 부피를 줄일 수 있는 종이접기 기술이 다른 어느 곳보다 중요한 분야이기도 합니다. 이러한 이유로 태양광 패널, 안테나, 망원경 등 다양한 대형 우주 구조물들에 이미 종이접기 설계 기술이 활발하게 활용되고 있습니다. 저는 이를 더욱 확장하여 더 많은 것들을 접는 것을 목표로 연구를 수행하고 있습니다. 좀 더 구체적으로는, 접을 수 있는 로버, 로봇팔, 그립퍼 등 다양한 로봇 요소들을 극단적으로 부피 압축이 가능하게 하면서도 안정적인 기능 수행이 가능하게 하는 다양한 로봇 시스템을 설계하고 있습니다.
Q. 서울대 기계공학과에서 2017년 2월 “Design and fabrication of variable diameter wheel based on origami structure”로 박사 학위를 받으셨는데 어떤 내용인지 소개 부탁 드립니다.
이 논문은 종이접기 구조를 활용하여 지름의 크기를 바꿀 수 있는 가변형 휠의 설계와 제작 방법에 대해 다루고 있습니다. 표면적으로는 형상이 변화하는 바퀴 메커니즘을 만드는 방법의 하나를 다루고 있는 것이지만, 그보다는 종이접기 설계 방법의 새로운 가능성을 증명하는 것을 목적으로 진행한 연구입니다. 이전의 종이접기 설계는 소수의 관절 구조를 초소형 로봇에 적용하는 것이 대부분이었습니다. 이 연구에서는 이러한 설계 기법이 좀 더 큰 스케일의 복잡한 기구학 메커니즘 구성에도 유용함을 보여주려고 하였습니다.
일반적으로 가변형 바퀴를 설계할 때 가장 어려운 부분은 가변성과 내하중이라는 서로 모순되는 두 가지 특성을 함께 만족시켜야 한다는 것입니다. 쉽게 말해서 바퀴가 무너지지 않으면서도 원하는 순간에는 변형할 수 있어야 합니다. 여기에 더해 시스템의 안정성과 효율성을 위해 구동기의 개수는 최소화하여야 합니다. 아마 가장 직관적인 해결책은, 기구학 설계를 아주 잘해서 바퀴 변형을 만드는 메커니즘이 1-자유도를 가지도록 하여, 구동기 하나로 지름의 크기를 바꿀 수 있으면서도 원하는 크기에서 고정할 수 있도록 하는 것일 겁니다.
이러한 메커니즘을 링크와 핀 조인트로 구성한다고 하면 상당히 머리가 아플 것입니다. 제작이 어려울 뿐만 아니라 무게 증가도 피할 수 없습니다. 사실 더 큰 문제는 바퀴의 특성상 흙바닥에서 구르고 충격도 많이 받아야 하는데, 이러한 복잡한 링크 구조로는 특정 부분이 조금만 휘어지거나 망가져도 전체가 고장이 날 확률이 높을 수밖에 없습니다.
종이접기는 이에 대한 좋은 해결책을 제시해주었습니다. 해당 바퀴는 특정 패턴으로 배치된 플라스틱 조각을 천으로 감싸 제작이 되었습니다. 천과 플라스틱의 조합은 원하는 형상을 유지할 수 있도록 해주면서 충격과 오염에도 별문제 없이 견딜 수 있도록 해주었습니다.
물론 종이접기를 사용한다고 해서 모든 것이 쉽게 해결된 것은 아니었습니다. 종이접기로 복잡한 기구학 메커니즘을 형성하기 위해서는 서로 다른 특성을 가지는 종이접기 패턴들을 견실하게 연결하여야 합니다. 이러한 연결에 있어서 필요한 설계 방법론과 더불어, 바퀴로 사용될 만큼 높은 내구성을 가질 수 있는 종이접기 구조 제조 방법에 관한 연구까지 마무리되어서야 비로소 해당 로봇이 제대로 완성될 수 있었습니다.
| |
 |
|
| ▲2011년부터 개발하여 온 종이접기 바퀴 로봇들. 아주 단순한 형태에서 시작하였지만, 종이접기 패턴과 재료의 지속적인 개선을 통해 지금의 모습을 만들 수 있게 되었다. (서울대학교 소프트로봇연구센터 제공) |
| |
 |
|
| ▲종이접기 패턴 설계. 바퀴 패턴은 종이접기 기본 패턴 중 하나인 Waterbomb에서 출발하여 목표 기능에 따라 패턴을 조금씩 변경시켜 완성했다. 종이접기 패턴의 움직임을 예측하기 위해 Kinematics와 같은 다양한 수학적 툴이 사용되었다. (서울대학교 소프트로봇연구센터 제공) |
Q. '트랜스포머블 휠(Transformable Wheel)‘이나 '트랜스포밍 타이어(Transforming Tire)’ 연구로도 주목을 받으셨는데 이들의 활용 분야라든가 중요성에 대해 설명 좀 부탁 드립니다.
종이접기 연구를 진행하면 필연적으로 따라오는 의문이 있습니다. 여러 장점이 있다고는 하지만 결국 소형 로봇 스케일 이상을 벗어나지 못하는 것이 아닌가 하는 것입니다. 한국타이어, EMVcon과 협력하여 진행한 Transforming Tire 프로젝트는 이러한 의문에 대한 답을 찾고자, 종이접기가 어디까지 갈 수 있을지 도전해본 결과라고 할 수 있습니다. 결과적으로 1톤 이상의 무게를 견딜 수 있고 지름의 크기를 450mm에서 800mm까지 변화시킬 수 있는 바퀴가 완성되었고, 이를 사람 한 명이 탈 수 있는 실스케일 차량에 장착하여 그 가능성을 입증하였습니다. 이는 기존 종이접기 메커니즘의 한계에 대한 인식을 바꾼 연구라고 생각합니다.
| |
 |
|
| ▲종이접기 바퀴의 주행 성능 테스트. 필요에 따라 크기를 자유자재로 바꿔 차량의 기동성을 크게 높일 수 있다. (서울대학교 소프트로봇연구센터 제공) |
| |
 |
|
| ▲종이접기 바퀴를 위한 특수 차량 제작. 바퀴의 크기 변경을 위해 유압 리니어 엑츄에이터를 사용하였으며, 전기모터를 이용하여 바퀴를 회전시킨다. (서울대학교 소프트로봇연구센터 제공) |
전체적인 구조 설계 원리는 앞서 이야기해 드린 박사 졸업 연구와 같지만, 이 연구에서는 더 높은 하중을 견디기 위하여 새로운 재료를 활용하는 제작 공법과 그를 위한 패턴 설계 규칙 등 여러 요소가 추가되었습니다. 강한 종이접기 구조를 만들기 위한 또 하나의 큰 장벽은 재료의 두께입니다. 우리는 종이를 접을 때 종이의 두께를 크게 신경 쓰지 않습니다. 하지만 큰 하중을 견디기 위해서는 두꺼운 재료를 써야 하고, 이는 더 이상 우리가 접던 방식대로 종이접기를 할 수 없도록 만듭니다. 이러한 상황에서 어떻게 종이접기 패턴을 수정하여야 하는지에 대한 설계 규칙을 만드는 것은 이 연구의 중요한 목표 중 하나였습니다.
| |
 |
|
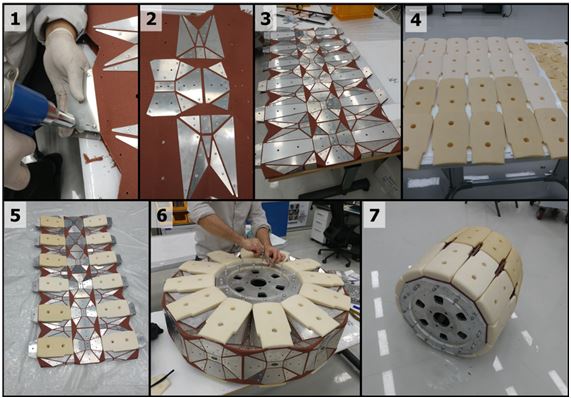
| ▲고하중 종이접기 바퀴 제작 순서. 타이어 골격부에 쓰이는 나일론-PET 천 소재에 항공기 재료로 쓰이는 알루미늄 60계열 소재를 리벳 공정으로 접합하여 제작한다. 알루미늄 소재 사이의 간격과 형상은 이 연구를 통해 새롭게 개발된 패턴 설계 규칙을 이용하여 결정하였다. (서울대학교 소프트로봇연구센터 제공) |
이 내용을 발표하면 흔히 듣는 질문 중 하나는, 이 바퀴를 언제쯤 우리 일상에서 볼 수 있을 것인가 하는 것입니다. 결론부터 이야기를 드리자면, 우리가 타고 다니는 승용차에 이러한 바퀴를 설치하는 일은 아마 없을 것 같습니다. 그보다는 여러 복잡한 지형을 통과해야 하는 차량, 예를 들면 모바일 로봇, 군용 차량, 재난 현장 정비 차량, 우주 탐사 차량과 같은 특수 목적 차량에 적용될 수 있을 것이라 보고 있습니다.
하지만 지금 바로 그런 곳에 쓰이기에는 아직은 완성도가 부족합니다. 이 연구는 종이접기 방법으로 실체 차량에 적용할 수 있는 가변형 바퀴를 만들 수 있다는 가능성을 증명한 연구입니다. 현장에 적용하기 위해서는 안정성, 내구성, 생산성 등을 개선하기 위한 후속 연구가 필요합니다. 이러한 부분은 차근차근 해결해 나가고 있습니다.
Q. 로봇을 연구하시면서 가장 어려운 점은 무엇입니까?
이 분야는 특이한 만큼 국내 국외 모두 연구하시는 분이 많이 없습니다. 본격적으로 시작된지 얼마 되지 않은 분야이기도 하고요. 그만큼 새로운 아이디어를 시도하기 좋다는 장점도 있지만, 그와 동시에 그 필요성을 스스로 증명해 나가야 한다는 부담감이 있습니다. 종이접기 로보틱스는 많은 가능성이 있지만, 아직 실제 필드에서 신뢰성 높은 서비스를 제공하기에는 해결해야 할 부분이 많습니다. 이는 단순히 설계 문제뿐만 아니라, 복합체 구조 해석, 고자유도 구동-센싱, 제조 공정 안정화 등 많은 분야가 얽혀 있는 문제이고, 그래서 쉽지 않은 문제입니다. 이러한 문제들을 잘 해결하여 로보틱스의 새로운 분야로 온전히 자리잡을 수도 있겠지만, 어쩌면 영영 해결하지 못해 조용히 사라질 수도 있습니다. 지금 그 갈림길에 서 있고, 이 분야를 온전히 자리 잡게 하는 것을 목표로 열심히 연구를 수행하고 있습니다.
Q. 로봇을 연구하시게 된 동기가 있다면?
여기엔 특별한 이유는 없는 것 같습니다. 아주 어릴 적부터 무언가 상상하고 만드는 것을 좋아했고, 나의 생각대로 움직이는 로봇은 그중 가장 매력적인 것이었습니다. 교수가 된 지금도 제가 하는 일은 발명가에 조금 더 가까운 것 같습니다. 연구실 환경도 상상하는 것은 무엇이든 만들어 볼 수 있도록 꾸미려고 노력하고 있습니다. 남들이 잘 하지 않는 분야를 한다는 것에 어려운 점이 많긴 하지만, 앞으로도 계속 재미있는 것들을 만들어 보려고 합니다.
| |
 |
|
| ▲ 이대영 KAIST 교수가 올해 2월 17일 강원도 휘닉스평창에서 열린 한국로봇종합학술대회 신진연구자세션에서 발표하고 있다. |
Q. 로봇 연구자로서 앞으로의 꿈과 목표가 있다면?
우주 로보틱스는 종이접기 로보틱스 분야의 큰 도전이 될 것입니다. 다른 우주 구조물에는 종이접기 구조가 많이 활용되고 있지만, 동역학적 부하가 많이 걸리는 우주로봇에 종이접기를 활용한 실증 사례는 존재하지 않습니다. 이 분야를 개척하고 기반을 다져서 가혹한 우주 환경에서 그 가능성과 효용성을 입증한다면, 로보틱스 분야 전반에도 큰 영향을 줄 수 있을 것이라 기대하고 있습니다.
누리호 3차 발사의 성공과 함께 국내에도 우주 진출에 대한 분위기가 달아오르고 있는 것 같습니다. 미국 주도의 아르테미스 계획을 비롯하여 유럽, 러시아, 일본 등 많은 나라들이 달 진출을 계획 중이고, 국제우주탐사조정그룹(ISECG)에서는 2030년부터는 본격적인 달 개척 시대가 도래할 것으로 예측했습니다. 우리나라 또한 달 탐사선 다누리의 성공에 이어 2032년까지 달 착륙선을 보낼 준비를 하고 있습니다. 제 연구로 탄생한 우주 로봇들이 언젠가는 달까지, 그리고 더 먼 우주로 가서 임무를 수행할 수 있는 날이 오길 기다리고 있습니다.
Q. 로봇공학자가 되려는 후배들에게 어떤 준비와 노력이 필요한지 조언해 주신다면?
후배들에게 로봇공학자가 되기 위한 길을 이야기해주기에는 제가 아직 많이 부족한 것 같습니다. 다만 여러 갈림길에서 많은 고민을 하고 있을 후배들에게 조금 다른 이야기를 해주고 싶습니다.
고등학생 때까지만 해도 인생에는 명확한 정답이 있는 것 같았습니다. 내신을 잘 챙기고, 수능을 잘 보고, 좋은 대학에 가면 되는 것이었죠. 하지만 그렇게 해서 대학교에 입학하면 갑자기 여러 선택에 내몰립니다. 학과 선택부터 시작해서 대학원 진학, 연구 분야, 유학, 취업까지, 우리에겐 계속 선택지가 주어지죠. 그리고 아마 대부분은 머릿속으로 각각의 선택에 대한 결과값과 확률을 고려해서 최적해를 도출하려고 애쓰고 있겠죠. 저도 그런 고민으로 많이 힘들었었고요. 하지만 시간이 지나고 여러 사람을 보면서 알게 된 건, 어차피 그렇게 열심히 계산해도 잘 안 맞는다는 것입니다. 지금의 정답이 내일은 정답이 아닐 수도 있고, 모든 것에는 너무 많은 우연이 작용합니다.
우리는 고등학교 시절을 거치면서 무의식 깊은 곳에 정답을 찾아야 한다는 생각이 프로그래밍되어 버린 것 같습니다. 그러지 않아도 괜찮다는 것을 이야기해주고 싶습니다. 가장 효과적이고 효율적인 최적해를 찾는 것보다 본인이 하고 싶은 것을 고민하는 것에 시간을 많이 쓰면 좋겠습니다. 남들이 좋다고 해서 좋은 것이 아니라, 본인이 인생을 걸어서 해보고 싶은 일이 무엇인지 많이 고민을 했으면 합니다. 우리는 보통 이러한 고민이 낭비라고 생각해서 인색한 것 같습니다. 그럴 시간에 하나라도 더 공부하라고 하죠. 하지만 나중에 돌이켜보면 어쩌면 그 시간이 가장 의미 있는 시간이 될지도 모릅니다. 그렇게 해서 찾은 답이 꼭 최적해처럼 보이지 않아도 괜찮습니다. 어차피 결과는 모르는 것이니까요.
Q. 연구에 주로 영향을 받은 교수님이나 연구자가 계시다면...
많은 다른 분들과 비슷하게, 저도 박사 지도 교수님이신 서울대 조규진 교수님 이야기를 드리고 싶습니다.
사실 저의 종이접기 연구의 시작은 너무 작고 초라했습니다. A4 용지를 적당히 접어서, 겨우겨우 굴러가는 작은 휠 로봇 하나를 만들었었습니다. 남들이 흔히 만드는 로봇과는 많은 차이가 있었습니다. 남들과 다른 길을 간다는 것이 나쁘지는 않았지만, 정말 이걸로 의미 있는 무언가를 할 수 있을 것인가에 대해서는 쉽게 믿음이 생기지 않았었습니다.
그때마다 지도 교수님께서는 지금 당장 보이는 것이 아니라, 우리의 연구가 보여주는 새로운 원리와 그 가능성에 집중할 수 있도록 도움을 주셨습니다. 그리고 결국에는 모든 사람들이 인정해 줄 것이라는 격려도 함께 해주셨습니다. 그러한 시간이 쌓이고 쌓여서 여기까지 올 수 있게 된 것 같습니다. 10년 전쯤 종이로 얼기설기 만들었던 바퀴는 이제 실제 자동차에 쓸 수 있는 수준까지 왔습니다. 물론 앞으로도 갈 길이 멀긴 합니다. 하지만 앞서서는 가능할까 자체에 대해 고민했다면, 지금은 시간은 좀 걸릴 수 있겠지만 불가능할 것이라는 생각은 들지 않습니다. 지금까지처럼 하나하나 해결하다 보면, 이 기술이 더 많은 분야에서 쓰이고, 나아가 우주까지 가는 것도 가능할 것으로 생각합니다. |

















