| |
 |
|
| ▲ EPFL이 개발한 소리 기반 위치 확인 기능 탑재 드론(사진=EPFL) |
박쥐는 캄캄한 동굴 안에선 주변 환경을 시각적으로 인식할 수 없다. 하지만 초음파를 발사해 돌아오는 메아리 패턴을 인식해 근처에 있는 물체나 장애물의 위치 정보를 얻는다. 박쥐처럼 로봇도 음향 기반으로 위치를 확인할 수 있는 능력을 갖춘다면 카메라, 라이다 등 고가의 센서 의존도를 줄일 수 있다. 이는 로봇의 생산 비용을 낮춰 대규모 로봇 배치를 가능하게 한다.
14일(현지 시각) 테크엑스플로어 보도에 따르면 스위스 EPFL 연구팀은 무인항공기(UAV)를 활용해 소리(sound) 기반 위치 확인 및 매핑 기능을 제공하는 프레임워크를 새로 개발했다. 이 프레임워크는 단순한 버저(busser, 소리신호 알림장치)와 저가 마이크를 활용해 구현 가능하다. 연구팀은 전문저널인 ‘IEEE 로보틱스 앤 오토메이션 레터’(IEEE Robotics and Automation Letters)에 연구 성과를 발표했다.
이번 연구를 수행한 프레데리크 둠브겐 연구원은 "우리는 마이크가 로봇, 특히 드론의 공간 항법에 사용될 수 있는지를 탐구하는 데 관심이 있다"며 "마이크는 인간과의 의사소통을 위해 이미 많은 로봇에 설치되어 있기 때문에 (공간) 탐색을 위해 하드웨어 비용이 추가로 들지 않는다. 박쥐는 밤에 동굴에서 놀라운 성능으로 음향을 사용해 비행할 수 있다. 이 같은 능력을 로봇에 구현하는게 가능하다"고 했다.
그동안 일부 연구자들이 박쥐가 방출하는 것과 유사한 초음파를 사용해 센서 없는 위치 측정을 시도했다. 하지만 EPFL 연구팀은 이번에 청각적인 소리에만 의존하는 위치 측정 및 매핑 시스템을 개발했다. 연구팀은 저렴한 MEMS 마이크와 버저를 활용해 음향 기반 내비게이션 알고리즘을 개발하고 시연했다.
| |
 |
|
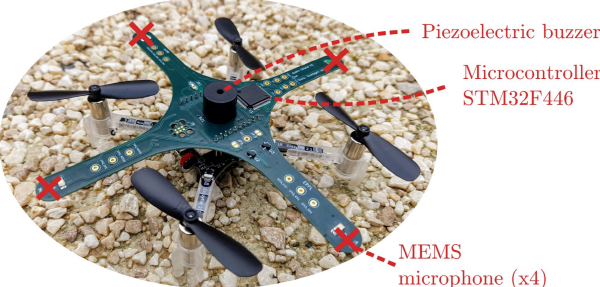
| ▲ 드론의 구조 |
| |
 |
|
| ▲ 비행 시연 장면 |
로봇이 일련의 온보드 버저를 통해 주파수 스윕(frequency sweeps)을 방출하면 온보드 마이크에서 반응을 수신해 주변의 벽을 감지한다.
둠브겐 연구원은 "주변에 벽과 같은 강한 반사체가 있으면, 소리가 반사되고 반사된 소리는 각 마이크의 직접적인 소리와 상호작용 한다"며 "거리와 주파수에 따라 두 신호는 서로를 감쇠시키거나 증폭시킨다. 따라서 방출된 주파수에 대한 마이크 신호의 음량을 보면 근처에 반사체가 있는지, 거리가 어느 정도인지 판단할 수 있다"고 말했다. 여러대의 마이크와 측정 장치를 추가적으로 사용해 로봇에 대한 반사체의 각도를 결정할 수도 있다는 것이다.
이 같은 음향 기반 위치확인 및 매핑 시스템의 장점은 특별히 정교한 마이크나 스피커가 필요하지 않다는 점이다. 이는 비행 시간 데이터가 아니라 오디오 간섭을 활용하기 때문이다. 오디오 간섭을 활용하면 더 긴 신호를 생성할 수 있어 저렴한 하드웨어 부품을 사용할 때도 '신호 대 잡음비'가 우수하며 측정 타이밍을 정밀하게 제어할 필요가 없다는 것이다.
연구팀은 이번에 개발된 기술을 활용하면 카메라 등 첨단 센서를 사용하지 않고도 음향을 이용해 주변 환경을 탐색할 수 있는 저비용 경량 로봇을 만들 수 있을 것이라고 밝혔다. |
















