| |
 |
|
| ▲ 코끼리 코에서 영감을 얻은 연속체 로봇. 적외선 카메라를 내장한 연속체 로봇이 파이프라인을 통과한다. |
코끼리 코에서 영감을 받은 유연한 구조의 연속체 로봇(continuum robot)이 개발됐다.
26일(현지 시각) 테크엑스플로어 보도에 따르면 중국 중산대(中山大学, Sun Yat-sen University), 다롄이공대학(Dalian University of Technology), 런던사우스뱅크대(London South Bank University) 공동 연구팀은 코끼리의 코에서 영감을 얻은 새로운 연속체 로봇을 개발했다고 밝혔다. 이 로봇은 응용 분야별로 맞춤형 설계가 가능하다. 연구팀은 이번 연구 성과를 전문 저널인 ‘소프트 로보틱스’에 발표했다.
연구팀에 따르면 연속체 로봇은 고정된 관절구조에 의해 제한되지 않는 케이블 또는 다른 변형 가능한 구성요소를 가지고 있어 비교적 자유롭게 움직일 수 있다. 하지만 이 같은 장점에도 불구하고, 대부분 연속체 로봇은 복잡하고 구조화되지 않은 환경을 효율적으로 탐색하는 게 여전히 어렵다.
이번 연구에 참여한 지아닝 우(Jianing Wu)는 테크엑스플로어에 "기존의 케이블 구동 연속체 로봇은 변형 후에 항상 원 모양의 프로파일을 보여주는데, 이는 다양한 곡률 환경과의 상호작용을 방해할 수 있다“며 "이런 한계를 극복하기 위해 다양한 곡률을 가진 응용 시나리오에 적응 가능한 연속체 로봇 패러다임을 시도했다"고 말했다.
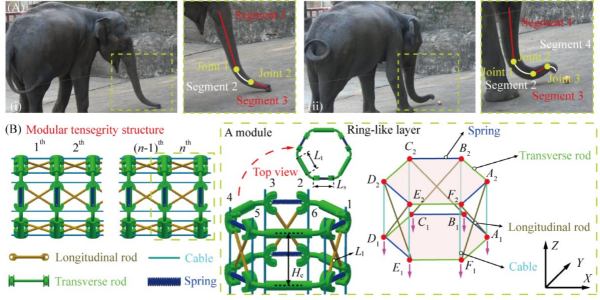
코끼리의 코는 ‘유사 관절’(pseudo-joints)로 연결돼 있다. 이 같은 코의 특성은 코끼리들이 구조화되어있지 않은 환경에서 효율적으로 상호작용할 수 있도록 해준다. 예를 들어, 코끼리는 코를 유연하게 조절해 좁은 공간으로 들어가거나 높은 위치에 있는 나뭇가지에 도달할 수 있다.
| |
 |
|
| ▲ 연속체 로봇의 개념 |
코끼리의 독특한 코는 각 부분의 강성(stiffness)이 독립적으로 조절되고, 다른 방식으로 구부러지도록 할 수 있다. 이는 궁극적으로 코끼리가 자신의 코 모양을 조정해 다양한 작업을 수행하거나 다양한 형태의 물체에 도달할 수 있도록 해준다.
하이준 펑(Haijun Peng) 연구원은 "코끼리 코의 움직임에서 영감을 받아 우리는 사전에 프로그래밍이 가능한 강성 분포를 가진 연속체 로봇을 제시했다"고 설명했다. "강성 분포를 조절함으로써, 로봇은 다양한 변형 패턴을 보여줄 뿐만 아니라 다양한 곡률을 갖고 있는 파이프라인을 통과할 수 있다"는 설명이다.
이 로봇은 여러 탄성요소로 이뤄진 클래스-3의 텐세그리티 구조를 기반으로 하고 있다. 연구팀은 서로 다른 강성 자성(different stiffness magnitudes)을 갖고 있는 탄성 요소를 교체하는 것만으로 로봇의 부분적인 강성 특성을 프로그래밍할 수 있었다. 강성 분포의 차이를 통해 연속체 로봇은 동일한 작동 기준에서 다양한 로봇 구성을 보여줄 수 있다.
연구팀은 지금까지 12개의 탄성 모듈로 구성된 프로토타입 로봇을 만들었다. 그런 다음 다양한 실제 시나리오에 맞춰 변형 능력을 테스트했다.
연속체 로봇은 단단한 관절 구조를 갖고 있는 로봇들이 수행하기 힘든 비정형 환경에서 더 많은 작업을 자동화하는 데 도움을 줄 수 있을 것으로 기대된다. 센서, 그리퍼 등 다양한 엔드 이펙터 설치를 통해 다양한 작업을 동시에 지원할 수 있다는 설명이다. |
















