MIT, 사람 손처럼 능숙한 로봇 핸드 기술 개발2000여종의 물체 위치와 방향을 손안에서 바꿀 수 있어
승인 2021.11.18 14:55:37
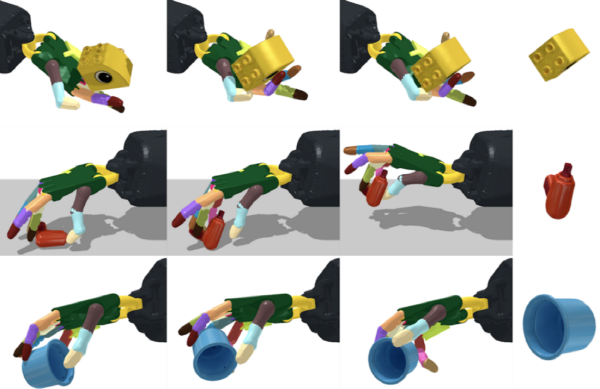
▲ MIT 연구진이 손안에서 다양한 물체를 조작할 수 있는 로봇 핸드 기술을 개발했다.(사진=MIT CSAIL)
MIT 컴퓨터과학 및 인공지능연구소(CSAIL) 연구진이 2000여개에 달하는 물체의 위치와 방향을 손안에서 바꿀 수 있는 로봇 핸드 기술을 개발했다고 밝혔다. 컵, 참치캔, 크랙커 과자상자 등 다양한 물건을 사람의 손처럼 능숙하게 조작할 수 있다.
이같은 능력은 다양한 형태의 물체를 빠르게 집어 다른 곳으로 옮길 수 있도록 도와주며, 심지어 한번도 본적 없는 물체에도 일반적으로 적용할 수 있다는 게 연구진 설명이다.
물류산업이나 제조산업에선 사람의 손처럼 물체를 다룰 수 있는 로봇 핸드 기술이 요구되고 있다. 연구팀은 인간의 손을 의인화한 24 자유도의 로봇 핸드 기술을 구현했고, 이 시스템이 미래 시점에 실제로 로봇 시스템에 구현될 수 있다는 것을 보여줬다.
이번 연구를 주도한 '타오 천(Tao Chen)' CSAIL 소속 박사과정 학생은 “산업 현장에선 일반적으로 제어가 간단하다는 이유로 병렬식 턱 그리퍼(parallel-jaw gripper)를 많이 활용하고 있지만, 이같은 형태의 그리퍼는 우리가 일상적으로 접하는 많은 도구들을 손안에서 조작할 수 없다”며 “우리가 개발한 시스템은 여러 도구들을 능숙하게 조작할 수 있는 다중 손가락 로봇 핸드를 만들 수 있도록 해준다”고 말했다.
다양한 유형의 물체를 손안에서 방향과 위치를 바꾸기 위해선 수많은 모터를 제어해야 하고, 로봇 손가락과 물체 사이의 접촉 상태도 빈번하게 바꿔줘야 한다. 로봇 핸드의 방향이 아래로 향하고 있다면 더욱 어려운 로봇공학의 문제점에 봉착하게 된다. 물체를 손안에서 조작해야 할 뿐만 아니라 중력의 작용을 우회해 물체가 떨어지지 않도록 해야한다.
연구팀은 딥러닝과 함께 ‘모델 없는(model-free) 강화학습 알고리즘’, ‘교사-학생(teacher-student)' 훈련 방법을 사용했다. ‘교사’ 네트워크는 실제 세계에선 그렇지 않지만 시뮬레이션 상에선 쉽게 접근할 수 있는 물체와 로봇에 대한 정보를 이용해 훈련을 받는다. 이어 연구팀은 로봇 핸드가 시뮬레이션 상황 밖에서도 작동할 수 있도록 '교사' 지식을 실제 세계에서 습득할 수 있는 '관찰(observation)'을 통해 정제했다. 관찰은 카메라로 포착한 심도 영상, 물체 포즈, 로봇의 관절 위치 등을 통해 정교화된다.
연구팀은 ‘중력 교육과정'(gravity curriculum)도 활용했다. 로봇 핸드가 먼저 무중력 환경에서 기술을 학습하고 이어 콘트롤러를 점점 중력 상태에 적응하도록 했다. 이 과정은 로봇 핸드의 전체적인 성능을 향상시키는데 큰 도움을 주었다. 연구팀은 단일의 콘트롤러를 활용해 이전에는 한번도 본적이 없거나 형태에 관한 정보가 없는 다양한 물체를 손안에서 능숙하게 조작할 수 있도록 했다.
연구팀은 이번 연구 성과를 ’2021 로봇학습에 관한 컨퍼런스‘(The Conference on Robot Learning·CoRL)에서 발표할 예정이다.