|
뿌리산업은 자동차ㆍ조선ㆍ전자 등 우리나라 주력 제조업의 근간을 이루는 기반 산업이다. 하지만 고위험 작업 환경, 낮은 임금체계, 종사자의 고령화 현상 등으로 인력 부족 현상이 심화되고 있다. 주력 제조업이 국제경쟁력을 잃지 않기 위해선 로봇자동화 시스템의 도입을 통해 뿌리산업의 경쟁력을 제고하는 게 절실하다는 목소리가 커지고 있다.
산업통상자원부는 지난 2019년 발표한 ‘제3차 지능형 로봇 기본계획’에서 근무 환경이 열악한 뿌리산업을 비롯해 섬유·식음료 등 3대 제조업을 중심으로 제조로봇 보급 확산 계획을 발표했다. 이 기본계획에 따라 산업통상자원부는 뿌리산업 등 3대 제조업을 중심으로 로봇 도입이 필요한 108개 공정을 우선 선별해 업종별·공정별 표준공정모델을 개발하고, 실증사업을 추진하고 있다.
뿌리분야의 경우 한국생산기술연구원이 총괄주관이 되어 표준 공정모델 개발과 제조로봇 선도보급 실증사업을 진행하고 있다. 뿌리산업의 제조로봇 선도보급 실증사업의 의미와 현황, 그리고 실증 사례에 대해 3회에 걸쳐 소개한다(편집자)
(기획 순서)
① 뿌리산업 제조로봇 선도보급 실증 사업 개요
② 뿌리산업 표준공정 모델과 실증 사례
③ 실증 사례
뿌리산업 제조로봇 선도보급 실증사업 총괄주관기관인 한국생산기술연구원은 수요기업, 공급기업 등과 컨소시엄을 구성해 제조로봇 공정 표준모델 도입 컨설팅과 선도보급 실증 사업을 진행하고 있다. 뿌리산업의 제조로봇 도입을 활성화하기 위해선 뿌리산업에 특화된 표준 공정 모델의 개발및 적용이 시급한 과제다. 표준 공정모델을 개발해 현장에 적용하면 시스템 구축 기간을 단축하고, 시스템 단가를 낮출 수 있을 것으로 기대된다. 신뢰성이 확보된 공정 모델 적용으로 시스템 유지보수 비용도 절감할 수 있다.
뿌리분야 표준공정 모델 개발은 그동안 저항용접공정과 머신텐딩공정에서 중점적으로 이뤄졌다. 실증사업의 경우 저항용접공정에는 알엠시스㈜, 대린테크㈜ 등이 참여 기관으로, 그리고 ㈜대립, ㈜세원테크 등 4개 기업이 세부주관기관으로 참여하고 있다. 머신텐딩공정에는 ㈜영창로보테크, 건솔루션㈜ 등 7개 기업이 참여기관으로, 그리고 코리아펀치, 블루코어㈜, 신진커넥터 등 21개 기업이 세부주관기관으로 참여하고 있다.
최근 국내 제조기업의 로봇 자동화 수요 시장은 고령화로 인한 노동인구 감소, 고임금화, 근로시간 단축, 외국인 근로자의 한계 등 노동시장이 위축되면서 로봇자동화에 대한 수요가 증가하고 있는 추세다. 수작업으로 진행되던 기존 공정의 공정모델 기반 자동화를 통해 생산비용 절감 및 품질관리비용 저감을 통한 단가 경쟁력 향상이 가능해진다.
◇ 공정모델 소개
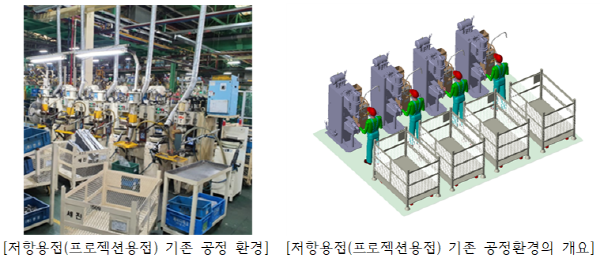
▲ 저항용접(프로젝션용접)
2020년 뿌리분야 공정모델 중 용접공정은 ‘저항용접(프로젝션용접)’이다. 자동차 부품 중 판재에 너트 등의 연결부품을 전기저항으로 용접하는 작업에 로봇을 활용하는 것이다. 작업과정은 부분품 적치대에서 부품을 이송해 용접기의 타점 위치에 정확히 위치한 뒤 용접 후 완성품 적치대로 부품을 이송하는 순서를 거친다.
저항용접(프로젝션용접)에서의 로봇 기반 자동화는 작업환경의 개선, 품질 향상, 생산성 향상에 효과가 있다. 로봇 기반 자동화 도입 전에는 ▷ 시간당 수십, 수백 개의 부품을 생산하는 환경에서 동일한 작업을 수행하는 작업자의 피로도가 높아지며 ▷ 높은 피로 상태에서 발생하는 부품 누락 및 용접부 누락 등으로 인한 불량이 발생하며 ▷ 모든 공정이 수작업으로 이루어져 생산성이 작업자의 기량에 크게 의존하는 문제가 있었다.
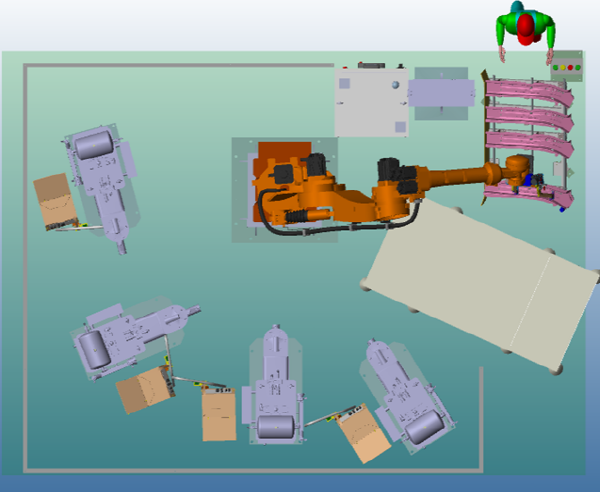
한국생산기술연구원은 용접공정 전문가, 자동화 설비 전문가들과 현장을 방문해 공정 환경과 기업주의 목표 개선 방향을 파악하고, 공정모델 타당성 검토 → 공정순서 및 레이아웃 설계 → 자동화 설비 구성품 및 기능 선정 → 3D 시뮬레이션 순서로 컨설팅을 수행했다. 컨설팅 결과를 활용해 자동화설비 도입에 따른 생산성 향상, 불량률 절감, 인건비 절감을 통한 경제성 분석을 통해 투자회수기간을 산출했다.
| |
 |
|
| ▲ 자동화 설비 3D 시뮬레이션 |
| |
 |
|
| ▲ 저항용접 공정 자동화 설비 구축 결과 |
▲ 머신텐딩
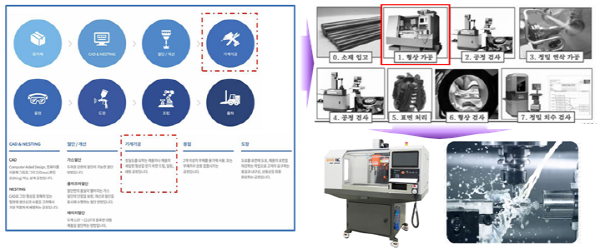
머신텐딩(Machine tending) 공정은 자동화 시스템을 사용해 산업용 공작기계를 자동 운전하는 것을 말한다. 가공물을 로딩/언로딩 하는 단순 반복적인 공정이 머신텐딩 시스템의 주요 기능이다.
로봇은 부품 검사, 블로오프, 세척, 디버링, 정렬, 포장 및 게이징과 같은 자동화 시스템 내에서 다른 중요한 기능을 수행한다. 머신텐딩 공정은 공작기계와 로봇간의 연동을 통한 공정 자유도 향상 및 상황변화에 능동적 대응이 가능한 고유한 자동화 가공시스템으로, ▷ 작업자의 능력에 의존하지 않는 ▷ 품질 균일화가 가능한 무인 자동화 가공시스템의 핵심 기술이다.
| |
 |
|
| ▲ 대상공정 |
머신텐딩은 협동로봇 기반과 산업용 로봇 기반 2가지 타입으로 분류된다. 협동 로봇기반 머신텐딩은 주로 1:1 머신텐딩을 다루며, 1:2 까지도 가능하다. 다품종을 다룰 수 있게 이동 및 재설치가 가능하고, 좁은 작업 반경과 저중량으로 안전펜스가 필요 없다. 산업용 로봇 기반 머신텐딩은 1:2 이상의 머신텐딩을 다루며, 소품종의 대량생산에 적합하고 비교적 넓은 공간과 고중량으로 안전펜스가 필수적이다.
머신텐딩 시스템의 경우 주로 협동 로봇이 활용된다. 거의 대부분 협동 로봇 메이커들은 가반중량 5~15kg 내외인 협동로봇을 생산하고 있다. 가반 중량은 6축 다관절 로봇의 끝단에 부착할 수 있는 하중을 의미한다.
이런 협동로봇은 로봇 제어기에 그리퍼와의 신호 입출력을 위한 인터페이스를 제공하고 있으며, 기본적으로 그리퍼의 온/오프 기능은 물론 전동 그리퍼를 사용하게 되면 벌어지는 양과 오므라지는 양을 제어할 수 있도록 하고 있다.
공정 대상물의 크기가 작은 경우 협동로봇은 피더(Feeder)라는 장치 위에 거치하는 형태로 설치되며. 피더를 이용해 협동로봇을 이동시킬 수 있다. 협동로봇의 이동으로 로봇 한 대로 설비 한 대에 적용할 뿐만 아니라 다른 설비에도 이동 적용할 수 있다. 시스템 구성은 CNC설비, 로봇, 그리퍼, 위치 인식용 센서 등의 H/W와 로봇과 CNC설비간의 통신 장치가 필수적이다. 필요에 따라 가공품의 검사를 위한 측정기가 추가되기도 한다.
| |
 |
|
| ▲ 머신텐딩 로봇시스템 구성 |
| |
 |
|
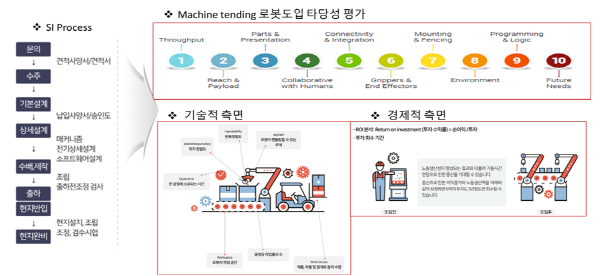
| ▲ 로봇 도입 절차 |
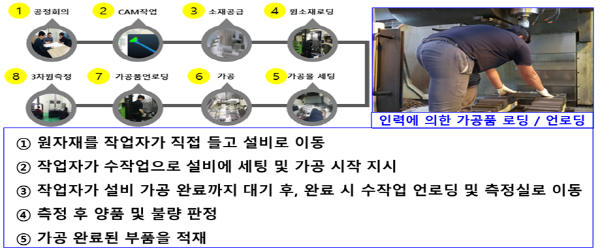
머신텐딩 공정 적용-정밀가공
기존 정밀가공 공정의 문제점으로 원자재의 공급/세팅/검사 등 다수의 작업자가 직접 공정을 진행하고 있어 상당한 피로 누적이 발생하고 중량물의 이동으로 인한 작업자의 근골격계 질환 등을 유발하고 있다. 또한 수동 세팅에 의한 품질 편차가 발생하고, 가공 완료 후 측정을 위한 제품 이동에 따른 리드 타임과 업무로스가 발생하는 문제점이 있다. 원자재의 공급/세팅/검사 공정의 자동화와 가공 종료와 동시에 검사할 수 있는 머신텐딩 공정을 활용하면 이러한 열악한 작업 환경을 개선하는 효과가 있다.
| |
 |
|
|
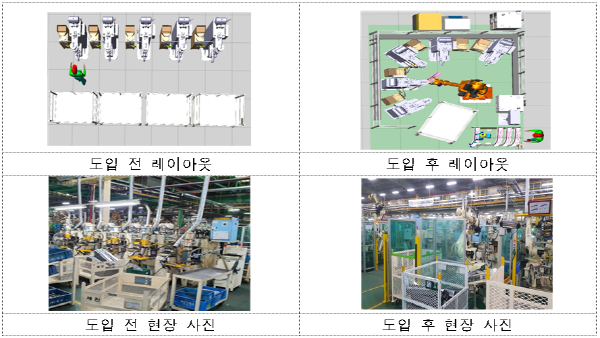
▲ 기존 공정의 공정흐름 및 문제점
|
| |
 |
|
| ▲ 머신텐딩 공정모델 적용 |
◇실증사례(SI기업 중심으로)
▲대린테크
뿌리산업 제조로봇 선도보급 사업 참여기관인 대린테크는 자동화 설비 제작 및 설치 전문기업이다.현대·기아·GM 등의 완성차 1차 협력사 차체·샤시 부품의 용접라인 및 전용장비를 설계부터 제작,설치,시운전까지 진행하고 있다.
그동안 대린테크는 SI기업(공급기업)으로서 뿌리산업 제조로봇 선도보급 실증사업과 관련해 여러 프로젝트를 진행했다. 세원물산, 세원테크, 한성 등 3개 기업의 하드웨어 작업자 수작업 용접공정을 로봇을 이용한 자동 용접공정으로 개선하는 프로젝트를 수행한 경험을 갖고 있다.
세원물산은 현대·기아자동차에 자동차 차체부품을 납품하는 기업으로 경북 영천에 소재하고 있다. 525명의 근로자들이 근무하고 있으며 연간 매출액은 1242억원에 달한다.
| |
 |
|
| ▲ 제조 로봇 도입 전후 공장 모습 |
제조 로봇 도입 전 세원물산은 작업자가 단일부품에 하드웨어를 수동으로 용접 작업을 수행했다. 장시간 수작업으로 작업자 피로도 증가, 그로 인한 작업 안정성 저하 및 품질 불량 발생 등의 문제점이 있었다. 제조로봇 도입 후에는 로봇이 자동으로 단일부품을 로딩/언로딩 후 하드웨어를 용접하는 방식으로 바뀌었다.
| |
 |
|
| ▲ 로봇 자동화 흐름도 |
작업 순서를 보면 우선 작업자가 로딩지그에 부품을 투입하는 부품 로딩 과정이 이뤄지고, 이어 핸들링 로봇이 하드웨어 용접장비에 부품을 안착시킨다. 핸들링 로봇이 제품을 하드웨어 용접장비에 고정시킨 상태로 프로젝션 용접을 실시하고 이어 핸들링 로봇이 하드웨어 접장비에서 완성품을 취출하고 팔레팅하게 된다.
세원물산은 제조 로봇 도입이후 수작업시 발생하던 작업자의 불안정성을 해소하고, 용접품질 불량 및 작업자 피로도 개선 효과를 거뒀다.
대린테크에 따르면 그동안 추진되었던 제조로봇 선도보급 실증사업은 단일 부품에 여러 사양의 하드웨어를 자동으로 용접하는 전용라인이었으나 향후 한 라인의 여러 부품에 여러 사양의 하드웨어를 자동으로 용접하는 다품목 공용 라인을 기획하고 있다. 또한 대린테크는 제조로봇 선도보급 실증사업으로 축적된 데이터를 이용해 향후 유사 공정 개선 및 타 협력사에 하드웨어 자동화 용접공정을 보급한다는 계획이다. |