|
'젊은 로봇공학자(Young Robot Engineer)' 코너는 한국로봇학회와 로봇신문이 공동으로 기획한 시리즈물로 미래 한국 로봇산업을 이끌어 갈 젊은 로봇 공학자를 발굴해 소개하는데 있다.
42번째 인터뷰는 현대자동차 김규남 박사다. 김 박사는 경기과학고, 서울대 기계항공공학부를 졸업하고 미국 UC버클리(University of California, Berkeley)에서 기계공학으로 석사, 2016년 12월 박사 학위를 받았다. 졸업후 2017년 2월부터 2020년 4월까지 캘리포니아공과대학(Caltech)에서 박사후 연구원(Postdoctoral Scholars)으로 근무하면서 도심항공모빌리티(UAM), 고속경량 자율주행 드론, 멀티로터 기체의 고장 대응을 위한 설계 및 제어, 지상에서의 이족보행 및 공중에서의 비행이 가능한 이중보행모드 로봇 등을 연구했다. 현재는 지난 7월부터 현대자동차 의왕연구소 도심항공모빌리티(UAM)사업부 기체개발팀에서 책임연구원으로 근무하고 있다.
주요 관심분야는 인간의 삶의 질을 혁신적으로 높일 수 있는 미래 어플리케이션을 위한 독창적인 자율로봇시스템 개발로, 주로 도심항공모빌리티(UAM), 로보틱스, 동역학, 제어 및 추정이론, 모션 플래닝, 비전 기반 네비게이션, 설계 최적화 등이다. 2004년~2009년 국가과학기술 장학생, 2010년~2015년 삼성장학회 장학생으로 선발되었다.
Q. 현대자동차 도심항공모빌리티(UAM) 기체개발팀에 대한 소개 부탁 드립니다.
현대자동차 UAM사업부는 머지않아 급성장을 이룰 것으로 예상되는 UAM 시장의 선점을 위해 UAM 핵심기술 개발과 사업 추진을 전담하고 있는 조직입니다. 사업부 내에서도 UAM 기체개발팀은 UAM 완성기체의 개발을 위해 관련 분야의 전문가들이 모여 있는 팀으로, 그 중에서도 저는 제어 항전을 담당하는 그룹에 속해 있습니다.
Q. 지난 7월부터 현대차에 입사하신 것으로 알고 있습니다. 최근 하고 계신 연구가 있다면 소개 부탁드립니다.
현대자동차에서는 저희 사업부가 개발을 목표로 하고 있는 UAM 기체의 제어기 설계 및 자율 비행 알고리즘의 연구개발 업무를 맡고 있지만, 아직은 입사한지 얼마 되지 않아 많은 이야기를 해드릴 수는 없을 것 같습니다. 대신 제가 캘리포니아공과대학(Caltech)에서 진행하다 현재 마무리하고 있는 연구 두 가지를 소개해 드리고자 합니다.
첫번째 연구는 멀티로터 기체에서 하나 이상의 프로펠러가 고장이 났을 경우에 추락하지 않고 조종성을 유지하면서 비행을 지속할 수 있는 제어기의 설계 및 기체 형상 설계에 관한 연구를 진행하고 있습니다. 현재 개발되고 있는 다수의 UAM기체들을 포함하여 많은 멀티로터 기체들은 이러한 고장 상황에 대비하기 위해 여러 개의 프로펠러들을 다중화하여 사용하도록 설계가 되고 있는데, 이 경우에도 어느 프로펠러들이 고장이 나는지에 따라 일반적인 제어기로는 비행 조종성을 유지하기 어려운 경우들이 발생합니다.
하지만 기체의 운용에 있어 안전은 특히 중요한 부분이므로, 이와 같은 어려운 상황에서도 기체를 추락시키지 않을 수 있는 특별한 제어기가 필요하며, 경우에 따라서는 이러한 제어기를 효과적으로 작동시키기 위해 기체의 프로펠러 배치나 형상 또한 주의 깊게 설계가 될 필요가 있습니다.
제가 진행하고 있는 연구에서는 기체의 운동 특성을 면밀히 분석하여 프로펠러 고장 발생시 제한된 조종 입력만을 사용해서 구현 가능한 운동을 정의하고, 이를 추종하는 제어기를 설계하는 방법을 고안하였으며, 이러한 연구결과는 승객을 태우는 UAM 기체의 안전성을 확보하는데 특히 중요하게 기여할 수 있을 것이라고 생각합니다.
두번째 연구로는 다리와 프로펠러를 결합하여 지상에서의 이족보행 및 공중에서의 비행이 가능한 이중보행모드 로봇을 개발하고 있습니다. 현존하는 대다수의 로봇들은 지상보행이나 공중 비행 한가지 이동 방법에 특화되어 개발 및 제작되어 왔는데, 일반적으로 지상 로봇은 지형이 보행 성능에 큰 영향을 미치고 크거나 높은 장애물을 넘어서 보행하는데 애로사항이 있다고 알려져 있으며, 비행 로봇은 상대적으로 에너지 소비가 크고 무거운 임무 장비를 싣기가 어렵다는 단점이 있습니다.
이 연구에서는 이러한 단일보행모드 로봇들의 문제점들을 극복해 보고자 새로운 형태의 이중보행모드 로봇을 개발하게 되었으며, 이 로봇은 어려운 지형이나 장애물을 극복할 필요가 있거나 고지대로 이동할 때에는 프로펠러를 이용하여 비행하고, 평탄한 지형을 이동하거나 한 장소에 오래 머무르면서 임무를 수행해야 할 때에는 두 다리를 이용함으로써 에너지 소모를 줄일 수 있다는 장점이 있습니다. 이러한 장점들을 기반으로 기존의 로봇들이 해내기 어려웠던 임무들, 예컨대 정유공장 파이프의 점검 및 교체와 같은 임무들을 해낼 수 있을 것이라 기대하고 있습니다.
| |
 |
|
| ▲ Caltech의 이중보행모드 로봇 LEONARDO |
Q. 미국 캘리포니아주립대 버클리캠퍼스(UC Berkeley)에서 “On the Locomotion of Spherical Tensegrity Robots”을 주제로 박사 학위를 받으셨는데 어떤 내용인지 소개 부탁 드립니다.
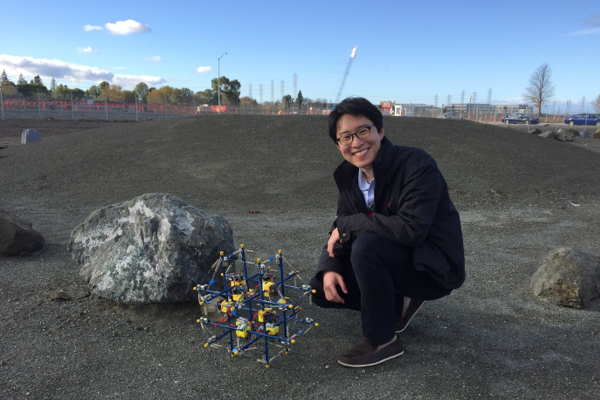
텐세그리티 구조물이란 강체 막대들이 상호간의 직접적인 접촉없이 탄성체로 연결되어 형태를 유지하는 구조물을 지칭합니다. 이러한 구조물 중에서도 구형에 근사한 다면체 텐세그리티를 흔히들 구형 텐세그리티로 지칭하는데, 저는 박사과정동안 구형 텐세그리티 구조물에 기반한 로봇의 개발에 관한 연구를 수행하였습니다. 그 중에서도 구형 텐세그리티 로봇의 두 가지 보행 방법인 구름과 도약 운동을 구현하는 방법들을 개발하는데 중점을 두었고, 이를 서로 다른 형상을 지닌 두 종류의 텐세그리티 로봇에 실제로 적용하여 검증하였습니다. 텐세그리티 로봇은 가벼울 뿐만 아니라 구조적인 탄성력도 가지고 있어 외부 충격에 강하다는 장점이 있기 때문에, 향후 인간 보조 로봇에서부터 우주 탐사 로봇까지 다양한 용도로 활용될 것으로 기대되고 있습니다.
| |
 |
|
| ▲UC Berkeley, Berkeley Emergent Space Tensegrities랩의 텐세그리티 로봇과 함께 |
Q. 도심항공모빌리티(UAM)나 자율주행 드론 같은 비행체에 대한 연구를 많이 하신 것으로 알고 있습니다. 관련 분야에 대한 활용 범위, 중요성은 무엇이 있을까요?
자율 비행 드론은 이미 수년 전부터 정찰이나 실시간 감시, 탐색 및 구조활동, 배송, 원격 탐사 등의 임무에 광범위하게 활용될 수 있을 것으로 기대되어 왔으며, 최근 부상하고 있는 UAM기체들은 공항 셔틀이나 에어 택시같은 승객 운송 서비스를 비롯하여, 도심간 화물 운송이나 날으는 구급차와 같은 긴급 의료 서비스 제공 등 그 활용 범위가 점점 더 폭넓게 증가할 것으로 예상되고 있습니다. 이 같은 새로운 운송수단들의 도입은 머지 않은 미래에 경제, 사회, 문화 등 우리의 삶 전반에 걸쳐 혁신적인 변화를 가져올 것이라 예상되는바, 이러한 변화에 선제적으로 대응하고 국제적으로 이 분야를 선도해 나가기 위해서는 활발한 연구개발 활동을 통해 핵심 관련 기술들을 선점하는 것이 무엇보다 중요하다고 생각됩니다.
| |
 |
|
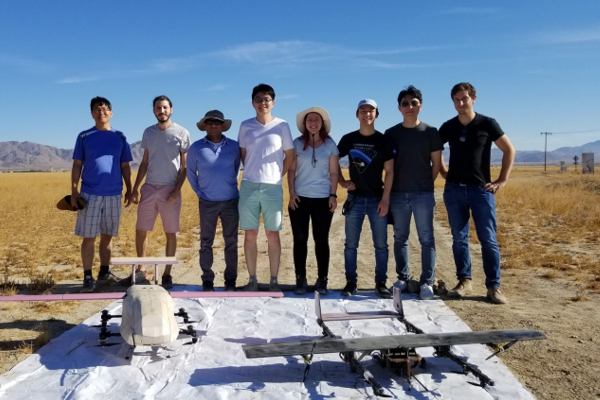
| ▲Caltech, Aerospace Robotics and Control Lab의 자율 비행 드론과 함께 |
Q. 하늘을 나는 자동차로 대표되는 도심항공모빌리티(UAM) 연구에서 가장 큰 애로 기술은 무엇인지 궁금합니다.
일반적으로 아시다시피 항공기는 엔지니어링의 집약체라고 볼 수 있을 정도로 굉장히 많은 기술 요소들이 포함되어 있습니다. 더욱이 UAM 기체들은 지금까지 존재하는 다른 비행체들과는 차별화된 요구사항과 기능을 필요로 하는 새로운 형태의 기체이기 때문에, 그 개발에 있어 다양한 공학분야로부터의 첨단 기술들의 접목을 필요로 하고 있으며, 이 각각의 기술들 모두가 애로 기술이라고 감히 말씀드릴 수 있겠습니다.
그 중에서도 도심지역을 운행하는 UAM의 특성상 기체의 안전과 관련된 기술들이 가장 어렵고 중요한 기술이라고 생각하며, 기체의 안전을 확보할 수 있는 비행 제어와 자율비행기술 역시 이러한 맥락에서 큰 애로 기술이라고 생각합니다. 앞서 말씀드린 프로펠러 고장에 대비한 비상 안전 제어기 설계와 같은 안전비행제어 연구가 하나의 예가 될 것입니다.
뿐만 아니라 UAM이 본격적으로 상용화 된다면 다수의 UAM기체들이 동시다발적으로 운용이 될 텐데, 이 경우 모든 기체에 숙련된 파일럿을 탑승시키는 것은 불가능할 것으로 보이며, 만일 가능하다 하더라도 경제성이나 안전성 측면에서 불리할 것이라고 예상되고 있습니다. 이러한 이유로 높은 수준의 안전이 확보 가능한 자율비행기술이 향후 UAM의 상용화를 위해서는 필수적일 것이지만, 자율주행차의 경우에서 보듯이 이러한 자율운행기술의 개발은 많은 시간과 비용을 필요로 하는 만큼, UAM산업이 태동하는 현 시점에서부터 UAM 자율비행기술 확보를 위한 본격적인 노력이 필요하다고 생각합니다.
Q. 하늘을 나는 기체인 UAM이 최근 주목받고 있습니다. 관련 분야의 최신 시장 동향이나 기술 트렌드가 있다면 무엇인가요?
제가 처음 이 분야의 연구를 시작하게 된 것은 약 3년전 Caltech의 Autonomous Flying Ambulance (AFA) 프로젝트에 참여하게 되면서부터 였습니다. 프로젝트 초기에 저희 팀은 ‘도로 주행이 가능한 도심 운항 비행체’, 말그대로 하늘을 나는 자동차를 만들고자 하는 목표를 가지고 있었습니다. 이러한 비행체는 기존의 도로 인프라를 활용하며 비행 뿐만 아니라 지상 운행이 가능하다는 장점을 가지고 있기 때문에 엔드투엔드(end-to-end) 운송수단으로써 매력적으로 느껴졌었지만, 연구가 진행될수록 운행하는 도로의 폭 제한으로 인해 비행체 날개 면적이 제약을 받아 비행에 불리해지는 단점을 극복하기가 상당히 까다롭다는 것을 알게 되었습니다. 더구나 기존에 운행하고 있는 다른 지상차량들과 함께 운행하기 위해 갖춰야 할 관련 법규나 안전수칙의 정립, 도로교통시스템의 재정비 등도 해결해야 할 현실적인 문제로 예상이 되었습니다.
현재에도 이러한 하늘을 나는 자동차의 상용화를 목표로 하는 기업들도 있고, 저 역시도 언젠가는 이러한 운송수단이 탄생하기를 기대하고 있지만, 여타 많은 기업들은 좀 더 가까운 미래에 상용화 가능성이 큰 전기추진수직이착륙기(eVTOL: electric Vertical Take-Off and Landing)를 개발하고 있습니다. 이 기체는 수십에서 수백km 수준의 운행거리를 가지고 도심 곳곳에 설치된 수직이착륙장(vertiport)으로 지칭되는 장소에서 이착륙 및 지상교통시스템과 연계를 하는 운용 컨셉을 가지고 있으며, AFA 프로젝트도 연구가 진행됨에 따라 eVTOL을 중점적으로 연구하게 되었습니다. 이러한 eVTOL의 개발 및 상용화를 위해 기존의 전통적인 항공기 기술들의 성능 향상화 뿐만 아니라 여러 새로운 기술 요소들이 연구개발 중에 있으며, 대표적으로 분산전기추진, 배터리, 소음 저감, 자율 비행, 항공교통관제 등의 분야들을 들 수가 있겠습니다. 특히 자율 비행은 로봇공학과도 깊은 연관이 있는 분야라고 할 수가 있겠습니다.
| |
 |
|
|
▲Caltech의 Autonomous Flying Ambulance 비행시험을 마치고 정순조 교수님 및 팀원들과 함께
|
Q. 무인기나 비행체를 연구하시게 된 동기가 있다면?
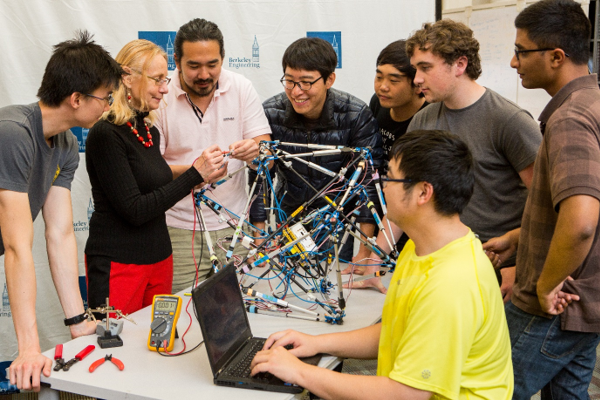
아주 어렸을 적 아버지를 따라서 혜성 관측 행사에 참여한 것을 계기로 항공우주분야에 관심을 가지게 되었고, 고등학교와 대학 교육 과정을 거치면서 관련 학문들에 심취하게 되었습니다. 그러다가 제 박사 지도교수님이신 UC Berkeley의 앨리스 아고지노(Alice M. Agogino) 교수님 연구실에서 미국항공우주국(NASA)의 연구원들과 함께 우주 탐사 로봇 연구를 진행하고 계시다는 것을 알게 되었고, 교수님께 참여를 부탁드려 관련 연구로 박사학위까지 받게 되었습니다. 이 때 진행했던 연구는 무척이나 즐거웠지만, 한편으로는 대상지가 우주이다 보니 현실감이 다소 떨어진다는 아쉬움도 생기게 되었습니다. 이에 항공과 우주분야 로봇들을 함께 연구하고 계신 Caltech의 정순조 교수님의 연구실에서 포닥으로 근무할 기회를 얻게 되었고, 우리 생활에 좀 더 밀접하게 영향을 미칠 수 있는 AFA를 비롯한 무인기와 관련된 연구에 참여하면서 연구 영역을 확장할 수 있었습니다. 그러면서 가까운 미래에 UAM이 사람들의 삶을 혁신적으로 변화시킬 것이란 생각이 점점 더 강하게 들었고, 그동안 쌓아온 경험을 바탕으로 이러한 변화를 만들어 나가는데 동참하고 싶은 마음에 현재 UAM 기체개발 업무에 참여하게 되었습니다.
Q. 미국의 명문 캘리포니아주립대 버클리캠퍼스(UC Berkeley)에서 기계공학으로 석사와 박사 학위를 받으셨는데, 미국의 UAM에 대한 기술 수준은 어느 정도이고 언제쯤 상용화가 정말 이루어 질지 궁금합니다.
미국은 기존의 탄탄한 항공업체들과 도전적인 스타트업 기업들, 정부 기관들과 국가 연구소, 그리고 학계가 합심하여 UAM을 실현하는데 필요한 기술들을 선도하면서 시장 개척에 앞장서기 위해 발빠르게 움직이고 있습니다. 대표적으로 NASA에서는 UAM 생태계를 구축하기 위해 각 기관들과 연계하여 향후 수년간 '첨단 에어 모빌리티 국가 캠페인(Advanced Air Mobility National Campaign)'을 단계별로 진행하고 있습니다. 이를 통하여 UAM 기술 개발을 위한 협업체 구성을 촉진하고, 향후 UAM 의 운용 형태와 관련법규 논의를 진행하는 한편, 대중들에게는 UAM에 친숙해지는 계기를 마련하고 UAM의 안전성을 신뢰할 수 있도록 설득하려 하고 있습니다. 이러한 추세에 발맞추어 우리나라 역시 얼마전 한국형 도심항공교통(K-UAM) 로드맵을 발표함으로써 UAM을 통한 교통 혁신을 이루어내고 UAM 선도국가로 도약하고자 하는 비전을 분명히 하였으며, 2025년 상용화를 시작으로 2030년에 본격적인 상용화를 이루어 내고자 하는 목표를 세웠습니다. 이러한 계획은 UAM에 빠르게 대응하고 있는 다른 나라들과 비교해도 시기적으로 뒤쳐지지 않으며, 국가적 역량을 집중한다면 우리나라도 충분히 UAM 선도국가 반열에 오를 수 있을 것이라 생각합니다.
Q. 캘리포니아주립대 버클리캠퍼스(UC Berkeley) 졸업 후 Caltech에서 박사 후 연구원으로 3년여 계셨는데 미국 연구분야의 강점이나 우리가 배울 점은 무엇이 있나요?
제 짧은 식견으로는 미국에서 이루어지고 있는 수많은 연구분야들의 강점을 식별할 수는 없을 것 같아서, 제가 미국에서 연구하면서 부러웠던 점으로 답변을 갈음하면 어떨까 싶습니다. 저는 어릴 적 꿈이 NASA에서 근무해보는 것이었는데, 운이 좋게도 UC Berkeley 대학원 재학 당시에는 NASA 에임스(Ames)센터에서 인턴을 할 기회가 있었고, Caltech에서 포닥으로 근무하는 동안에는 제트추진연구소(Jet Propulsion Lab)의 연구원분들과 같이 협업하면서 교류를 할 기회들이 있었습니다. 그러면서 미국에서 진행되고 있는 다양한 우주탐사 프로그램에 관한 정보를 들을 수 있었고, 그러한 연구들이 가능토록 하는 그들의 경험과 기술력, 경제력이 부럽곤 했습니다. 일례로 NASA에서는 기술성숙도가 높지 않더라도 획기적인 우주기술 아이디어를 지원하는 초기단계 혁신(ESI: Early Stage Innovations) 지원 프로그램을 운영하고 있는데, 보수적이라고 할 수 있는 우주분야에서 이러한 지원은 꽤 특별한 것이었습니다. 제가 박사과정 동안 참여했던 텐세그리티 기반 우주 탐사 로봇 개발 프로젝트도 새로운 기술의 가능성을 확인하고자 하는 성격이 짙은 다소 도전적인 프로젝트였기에 이 프로그램으로부터 연구비를 지원받을 수 있었습니다.
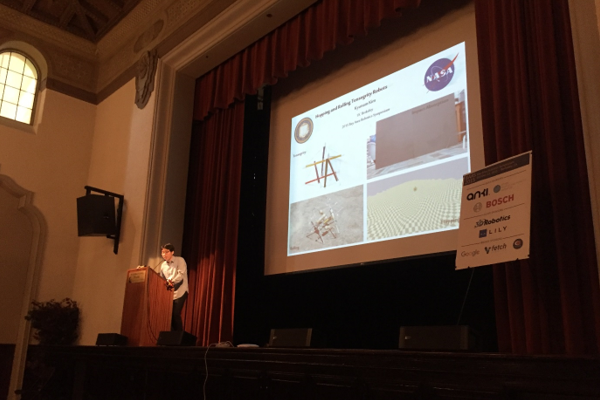
뿐만 아니라, 미국인들은 일반 대중들도 자국에서 진행중인 우주탐사 프로그램들에 관심이 많고 자부심을 가지고 있다는 것을 생생하게 느낄 수 있었던 계기가 있었습니다. 제가 Caltech에서 근무중이던 2018년에 NASA에서는 최초의 화성 지질 탐사를 위해 인사이트(Insight)라는 탐사선을 화성으로 쏘아 올렸는데, 이 탐사선이 발사되던 날 이를 기념하고 알리기 위한 행사가 대중들을 대상으로 Caltech의 대강당에서 열린 적이 있습니다. 평일 낮 시간 이었음에도 불구하고 넓은 강당이 남녀노소 할 것 없이 많은 사람들로 붐볐으며, 강당의 연단에서는 탐사 프로그램과 관련된 전문가분들이 일반 대중들을 위해 과학적 지식을 알기 쉽게 전달해주었습니다. NASA의 방송국에서는 탐사선 발사준비 과정부터 탐사선이 화성에 무사히 착륙하기까지의 전 과정을 생중계로 생생히 전달해 주었는데, 특히 탐사선이 본격적인 착륙을 시도한 마지막 몇 분간을 숨죽여 지켜보던 사람들이 탐사선으로부터 성공적인 착륙 신호가 도착하자 다 함께 환호성을 지르며 기뻐하는 모습이 매우 인상깊었습니다. 우리나라에서는 쉬이 볼 수 없는 이러한 풍경이 제게는 색다르게 다가왔고, 우리나라에서도 우주 탐사 연구가 좀 더 활발히 진행되어서 언젠가는 우리의 탐사선이 우주로 발사되고 이처럼 국민적 관심을 받는 행사가 열리면 좋겠다는 바람을 가지게 되었습니다.
| |
 |
|
|
▲2015 Bay Area Robotics Symposium에서
|
Q. 연구자로서 앞으로의 꿈과 목표가 있다면?
사람들에게 조금이나마 보탬이 되고 사람들의 삶을 긍정적인 방향으로 변화시키는데 도움이 될 수 있는 연구를 하는 연구자가 되고 싶습니다. 그리고 현재는 UAM을 통해 이러한 저의 꿈을 이뤄보고자 합니다. 사람들의 삶의 질을 높여줄 수 있는 안전하고 편리한 UAM을 개발하는데 제가 할 수 있는 최선을 다해서 기여하고 싶습니다.
Q. 최근 무인기나 하늘을 나는 기체에 대한 관심이 늘어나면서 이를 연구 하려는 학생이 늘어나고 있습니다. 선배로서 후배에게 어떤 준비와 노력이 필요한지 조언해 주신다면?
앞서 다른 분들의 인터뷰를 보니 많은 분들께서 로봇 공학은 다양한 분야를 아우르는 종합 학문이라는 점을 언급해 주셨는데, 저 또한 이에 공감하고 있습니다. 그리고 이는 무인기와 UAM을 비롯하여 비행체의 경우도 마찬가지라고 생각합니다. 따라서 비행체의 연구개발은 다양한 분야로부터의 지식과 경험을 가지고 계신 분들을 필요로 하는데, 이는 반대로 이야기하면 각 연구자분께서 현재 가지고 계신 연구 분야와 경험이 기체 연구에 유용하게 접목될 수 있는 부분이 존재한다는 뜻일 것입니다. 그 지점에서부터 추가로 필요한 지식을 습득하고 연구 영역을 넓혀 나가다 보면 본인의 흥미와도 맞는 훌륭한 연구들을 하실 수 있을 것이라 생각합니다.
그리고 이러한 연구활동에 있어 혼자서 진행하는 연구도 물론 있겠지만, 저는 많은 경우에 다른 연구자들과 함께 협업을 했는데 팀으로 함께 일을 한다는 것은 생각보다 어려운 일임을 깨닫곤 했습니다. 그렇기에 협업에 필요한 요소들, 예컨대 공동의 목표와 계획을 세우는 방법, 효과적으로 소통하는 방법, 업무를 분배하고 관리하는 방법 등을 틈틈이 고민해보시고 단지 협업에 잘 참여하는 것 뿐만 아니라 협업을 이끌어 나갈 수 있는 리더십을 키워 보는게 어떨까 합니다.
Q. 연구자로서 한국 무인기나 UAM 산업이 한 단계 더 발전하기 위해 조언을 해 주신다면...
아직은 제가 감히 어떤 조언을 할 수 있을만한 식견을 가지고 있지 않습니다. 다만 UAM산업의 발전을 위해 한가지 바라는 점이 있다면 많은 분들께서 UAM에 관심을 가져주시고 의견을 내어 주셨으면 한다는 것입니다. UAM산업이 발전하는데 있어 중요한 요소가 대중의 수용성이라고 합니다. 아무리 잘 만들어진 UAM기체라도 사람들이 신뢰하지 못한다면 성공적으로 상용화되기 어려울 것이지만, 새로운 기체에 드는 의심과 거부감을 없애는 일 또한 쉽지 않을 것입니다. 그래서 지금부터 UAM에 대한 사회적 공감대를 형성해 나가고 우리 사회에서 UAM산업이 나아가야 할 방향에 대해서 활발하게 논의가 진행된다면, 우리나라가 UAM 선도국가로 도약하는데 중요한 동력원이 되어줄 것입니다.
| |
 |
|
|
▲Alice M. Agogino 교수님 및 랩 동료들과 함께
|
Q. 연구에 주로 영향을 받은 교수님이나 연구자가 계시다면...
그렇게 길지 않은 연구경력에도 불구하고 참으로 많은 분들께 감사한 도움과 지지를 받았습니다. 그 중에서도 제 박사과정을 지도해주신 UC Berkeley의 Alice M. Agogino 교수님께서는 연구 지도도 물론 훌륭히 해주셨지만, 연구자로서 갖춰야 할 기본 자세와 연구에 임하는 태도를 가르쳐 주셨고, 그 가르침은 지금도 연구자로서의 제 근간을 이루고 있습니다. 제 포닥 연구를 지도해 주셨던 Caltech의 정순조 교수님께서는 창의적이고 도전적인 연구주제를 발굴하는 안목을 키워 주셨고, 다양한 항공우주분야 로봇공학 프로젝트에 참여시켜주심으로써 제 경험과 지식의 폭을 크게 넓혀 주셨습니다. 마지막으로 현대자동차 로보틱스랩의 현동진 박사님께서는 미국 유학시절 처음으로 저를 로봇 공학에 입문하게 해주신 장본인이시며, 지금까지도 로봇 공학에 대한 끝없는 열정과 비전을 제시해 주시면서 저의 멘토가 되어주고 계십니다. 그 외에도 저를 연구자로서 이만큼 성장할 수 있게끔 도와주신 모든 분들께 늘 감사드리며, 저 역시도 누군가에게 모범이 되는 연구자가 될 수 있도록 꾸준히 노력하고자 합니다. |

















