바이오 로보틱스, 해저탐사용 로봇 '실버2' 개발 완료해저 연구 및 쓰레기 처리 등에 활용
승인 2020.05.15 13:41:57
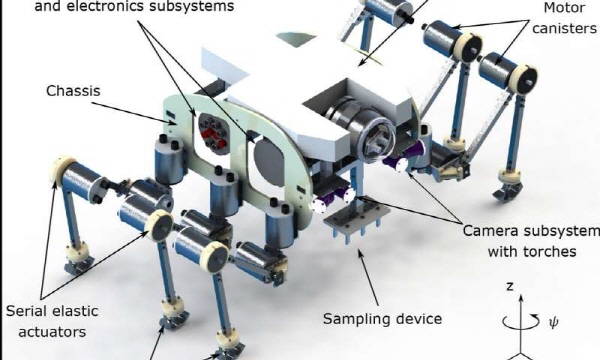
▲ 해저 탐사용 로봇 '실버2'(사진=테크엑스플로어)
최근 이탈리아 바이오 로보틱스 연구소(BioRobotics Institute) 소속 연구팀이 해저탐사용 로봇인 ‘실버2(SILVER2)’의 개발을 완료했다고 '테크엑스플로어'가 보도했다. 연구팀은 이번 연구 결과를 로봇 분야 국제학술지인 사이언스 로보틱스(Science Robotics)에 게재해 해당 로봇의 능력과 연구에 사용될 수 있는 방법에 대해 설명했다.
실버2는 지난 2018년에 나온 실버의 업그레이드 버전으로, 해저 상호 작용-탐사 및 연구용 차량(Seabed Interaction-Legged Vehicle for Exploration and Research)의 줄임말이다. 실버 로봇은 생물학자, 지질학자, 사진작가, 영화 제작자 및 수중 고고학자들을 위한 수중 탐사 용으로 개발됐다. 이번에 나온 버전은 이들 기능에 더해 해저 쓰레기를 수거하는 임무도 맡는다.
이 로봇은 6개의 다리로 해저 밑바닥은 물론 진흙과 바위 투성이인 표면을 건넌다. 기동을 위해 필요하다면 제자리에서 뛰기까지 한다. 방수 처리된 외관에 적용된 새로운 레그 안정화 모듈(leg-stabilizing module)을 이용해 균형을 유지하고, 네비게이션 시스템으로 장애물을 피하거나 원하는 위치로 이동한다. 압력 센서, 부력 시스템, 컨택트 센서, 카메라 및 마이크 등을 장착해 주변 환경을 촬영하기도 한다.
연구팀은 여러 조류환경을 포함해 해초, 진흙, 바위, 모래 등 다양한 조건에서 실버2를 테스트했다고 밝혔다. 테스트 결과 매우 조용한 모습으로 주변 바다생물을 자극하지 않으면서 이들을 촬영했다는 설명이다.
이 해저 로봇은 자율모드로 작동하거나 보트에 탑승한 사람을 통해 원격으로 조종한다. 해저에서 7시간 정도 걸어다니며 작업할 수 있고, 가만히 서 있으면 16시간까지 작동한다. 특히 주변 환경과 밀접하게 상호 작용하는 작업에 적합해 향후 생태학에서 고고학에 이르기까지 다양한 분야에서 활약할 것이라는 게 연구팀 설명이다. 아래 영상들은 실버2가 실제로 물속에서 기동하는 모습이다.