스탠포드대, 비둘기 모사한 비행 로봇 '피젼봇' 개발'사이언스 로보틱스' 등에 연구 성과 게재
승인 2020.01.17 15:37:38
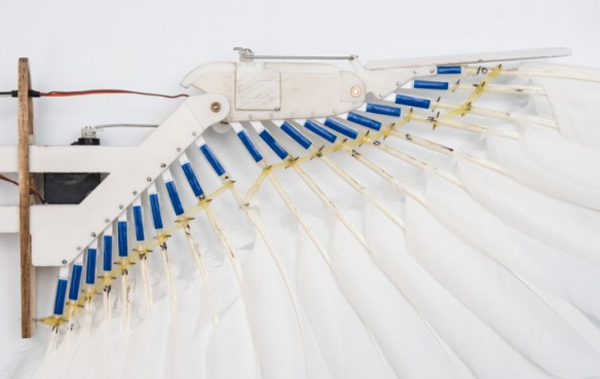
▲스탠포드대 연구진이 개발한 비행 로봇 ‘피젼봇(PigeonBot)’
미 스탠포드대 연구팀이 실제 비둘기의 깃털을 활용해 보다 민첩하게 비행할 수 있는 하이브리드 로봇을 개발했다고 ‘IEEE 스펙트럼’ 등 매체들이 보도했다.
과학자들은 오랫동안 새처럼 자유롭게 하늘을 날 수 있는 비행체의 개발을 추진해왔다. 하지만 새의 날개처럼 부드럽고 유연한 날개를 만들지 못했다. 항공기나 드론은 딱딱한 소재의 날개를 채택하고 있다.
스탠포드대 연구진이 개발한 비행 로봇 ‘피젼봇(PigeonBot)’은 실제로 죽은 비둘기로부터 40개 정도의 깃털을 뽑아 다른 로봇 부품들과 연계했다는 의미에서 ‘바이오하이브리드(Biohybrid)’ 로봇으로 불린다.
연구팀은 비둘기 날개의 역학을 연구한 결과 '핑거(fiinger)'와 ‘리스트(wrist)’로 불리는 날개의 뼈 구조물이 깃털의 움직임을 전반적으로 제어한다고 보고 이를 피젼봇에 그대로 적용했다. 핑거와 리스트의 조작에 따라 깃털이 서로 촘촘하게 달라붙거나 넓게 펼쳐진다는 점을 확인했다. 뼈의 모양과 각도, 근육의 형태 등을 분석해 ‘지향성 벨크로(directional velcro)’라는 기술을 통해 비행 로봇에 구현했다. 비행 로봇에는 로봇을 제어하기 위한 센서와 통신 부품, 추진장치 등이 탑재됐다.
연구팀은 핑거와 리스트를 컨트롤러로 제어하는 방식으로 비행 로봇의 날개짓을 구현, 보다 역동적인 비행 동작이 가능하도록 했다. 시연 결과 피젼봇은 빠른 방향 전환과 급강하 등 비행 동작을 무리없이 실행했다.
연구팀은 이번 연구 성과를 국제학술지인 '사이언스'(Science)와 '사이언스 로보틱스'(Science Robotics)에 두 편의 논문으로 게재했다.