| |
 |
|
| ▲ 사진은 ICROS2018 개회식 사진 |
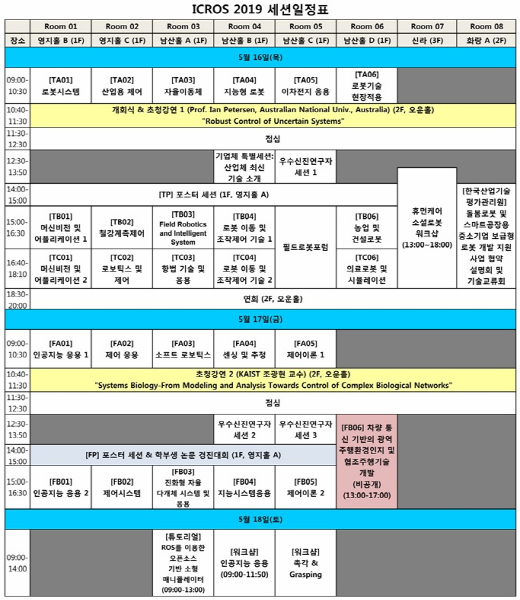
제어·로봇·시스템학회(회장 정정주)가 오는 16일부터 18일까지 경주 코오롱호텔에서 ‘제34회 제어·로봇·시스템학회(ICROS 2019)’를 개최한다.
올해 ICROS는 ▲초청 강연 ▲워크숍 및 포럼 ▲특별 세션 ▲전시 등으로 진행된다. 초청 강연은 호주국립대 이안 피터슨(Ian Petersen) 교수와 한국과학기술원 조광현 교수가 각각 '불확실한 시스템하에서의 로봇 제어(Robust Control of Uncertain Systems Systems)', '복잡한 생물학적 네트워크를 위한 모델링 및 분석(Biology-From Modeling and Analysis Towords Control of Complex Biological Networks)'을 주제로 발표할 예정이다.
휴먼케어 소셜 로봇, 필드 로봇 등을 주제로 포럼과 워크숍도 열린다. 휴먼케어 소셜 로봇 워크샵은 산업부에서 수행하는 서비스 로봇의 지능체계 개발과 산업부와 과기부가 공동으로 수행하는 AI기반의 휴먼케어 소셜로봇 기술 과제에 대한 연구개발 과정을 발표 및 토의하는 자리다. 특히 고령자를 케어할 수 있는 기반기술(H/W 플랫폼, 음성 대화, 소셜 로봇 HRI 및 소셜 매니퓰레이션)의 연구개발 과정을 발표한다.
필드로봇포럼에선 원자력 로봇기술의 응용(원자력연구원, 김승호 박사), 인공지능 로보틱스 (KAIST, 박혜원 교수), 수중해양 로봇개발 현황(한국로봇융합연구원, 홍영진 박사), 원전 폐로의 원격 절단 시스템 연구(부산대학교, 이민철 교수), 원자력산업 코드 & 스탠다드 소개(한전KPS, 박기태 처장) 등 주제가 발표된다. 이밖에 ROS를 이용한 오픈소스 기반 소형 매니퓰레이터 튜토리얼, 인공지능 응용 워크숍, 촉각 & Grasping 워크숍 등도 마련되어 있다.
행사 기간동안에는 특별 세션도 마련되어 있다. 로봇분야 신규 과제 협약설명회 및 기술교류회(한국산업기술평가관리원), 기업체 특별 세션: 산업체 최신 기술 소개, IFAC 유치 보고회 및 향후 추진 일정 소개, 우수신진연구자 세션, 학부생 논문경진대회 등이 진행될 예정이다.
전시장 주변에는 전시 부스도 마련된다. 유씨에스, 위고코리아, ㈜다나기술, Teledyne Lecry, 리얼타임 웨이브(REALTIMEWAVE), ㈜에스오에스랩, KCEI, ㈜메카솔루션, ㈜다인큐브, ㈜영일교육시스템, ㈜루미솔, 로보티즈, 한컴MDS 등이 제품을 출품한다.
|