싱가포르 난양공대 연구진이 이케아 가구를 조립하는 로봇 기술을 개발했다. 가구를 조립하는 일은 부분품의 구성을 파악 및 인지하고 힘을 조절해 각 부분품을 꿰어맞춰야 하는 고난도 작업이다.
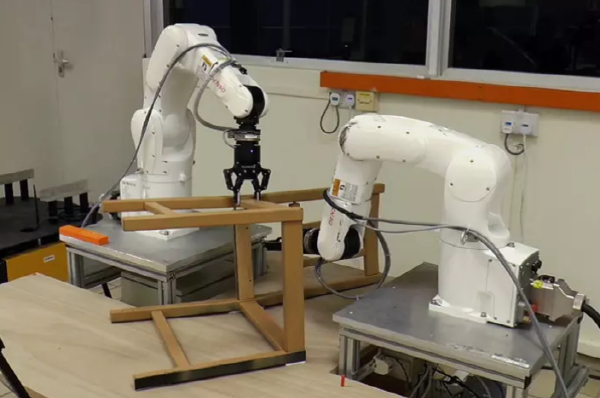
난양공대 ‘쿠앙-쿠옹 팜(Quang-Cuong Pham)’ 교수팀은 2대의 산업용 로봇 팔이 협력 작업을 통해 이케아에서 구입한 25달러 짜리 의자를 DIY 방식으로 조립하는 훈련을 시켰다. 3D컴퓨터 비전 시스템이 주변에 설치돼 로봇에게 시각 정보를 제공하고, 2대의 로봇 팔은 각 부분품을 집어 꿰맞추기 위한 그리퍼와 힘센서를 갖췄다.
이번 연구 결과 로봇은 20분 19초만에 이케아에서 구입한 의자를 조립했다. 난양공대 연구진은 지난 2015년에도 이케아 가구 조립을 추진했지만 만족할 만한 성과를 거두지는 못했다. 연구에 투입된 로봇 팔은 6개의 카메라로 구성된 비전시스템을 갖추고 있었다. 이 비전 시스템은 3mm 정도의 위치 정확도를 갖고 있었다. 하지만 로봇은 다양한 하위 작업을 수행하는데 어려움을 겪었다.
사람은 주변이 어둡고 부품이 놓인 곳이 지저분하더라도 문제 없이 부품을 찾아 조립할 수 있지만 로봇은 그렇게 하지 못했다. 당시 연구팀은 당분간 로봇이 사람과 같은 수준의 능숙함으로 이케아 가구를 조립하는 것은 힘들 것으로 봤다.
2015년에 비해 이번 연구에서 로봇의 자율성은 크게 개선된 것으로 나타났다. 전체 시간 가운데 절반 이상을 경로를 설정하는 데 활용했고, 실제 실행 시간은 9분 정도였다. 로봇팔에 장착된 3D 카메라는 각각의 부분품을 확인 및 트래킹하고 힘센서는 조립시 과도한 힘을 가해 가구를 부러뜨리는 일이 없도록 힘을 조절하는 역할을 했다. 보통 사람이 이 가구를 조립하는데는 평균 10~15분의 시간이 걸린다. 로봇이 이케아 가구를 조립하는데 사람보다 늦었지만 대단한 도전을 성공적으로 마친 셈이다. 연구팀은 연구 성과를 전문 저널인 ‘사이언스 로보틱스’ 최신호에 게재했다.
한편 MIT 연구진은 지난 2013년 이케아 가구를 조립하는 ‘이케아봇(IkeaBot)’을 연구하고 관련 연구 성과를 지난 ‘2013 IEEE ICRA(International Conference on Robotics and Automation)’에서 발표한 바 있다.