인간 피부 닮은 ‘격자 구조 3D 센서’
중국 상하이자오퉁대학 연구팀이 인간 손가락 끝의 구조를 모방해, 유연성을 갖추고 있으면서 동시에 미세한 힘의 변화도 정밀하게 감지할 수 있는 3D 촉각센서를 개발했다고 밝혔다.
상하이 자오퉁대학 구잉 구(Guoying Gu, 谷国迎) 교수팀은 최근 국제 학술지 ‘스마트봇(SmartBot)’에 기존 소프트 센서의 한계를 극복할 수 있는 ‘3D 격자 이온트로닉 촉각센서(3D lattice iontronic tactile sensor)’를 개발했다고 발표했다. (논문 제목:Soft 3D Lattice Iontronic Tactile Sensor)
이번 연구 성과는 로봇이 계란과 같은 파손되기 쉬운 물체를 다루거나, 사람의 피부와 접촉하는 의료용 진단 로봇 분야에서 핵심적인 역할을 할 것으로 기대된다. 특히 파킨슨 증후군이나 국소 피부 경화증(localized scleroderma)과 같은 병변의 조기 선별 검사를 돕는 데 기여할 수 있다.
연구팀에 따르면, 휴머노이드 로봇이나 의수(prosthetics)가 실생활에 적용되려면 인간의 피부처럼 부드러우면서도 예민한 감각이 필수적이다. 하지만 기존의 소프트 센서들은 ‘변형 경화(strain-stiffening)’ 현상이 발생할 수 있다. 변형 경화는 재료가 늘어나거나 눌릴수록(변형될수록) 점점 더 딱딱해지는 성질을 말한다.
예를 들어 풍선을 불 때 처음에는 잘 부풀지만, 터지기 직전까지 커지면 고무 막이 팽팽해져서 손가락으로 눌러도 잘 들어가지 않을 정도로 단단해진다. 기존의 센서들 역시 압력이 가해질수록 재료가 단단해지면서 추가적인 힘의 변화를 감지하지 못하는 현상이 발생한다.
이번에 개발한 소프트 전자 압력센서는 유연하면서 동시에 물체에 가해지는 압력을 정확하게 인지할 수 있다. 연구팀은 인간의 지문과 내부 조직이 3차원 구조로 이루어져 있어 강한 압력에도 감각을 유지한다는 점에서 영감을 얻었다.
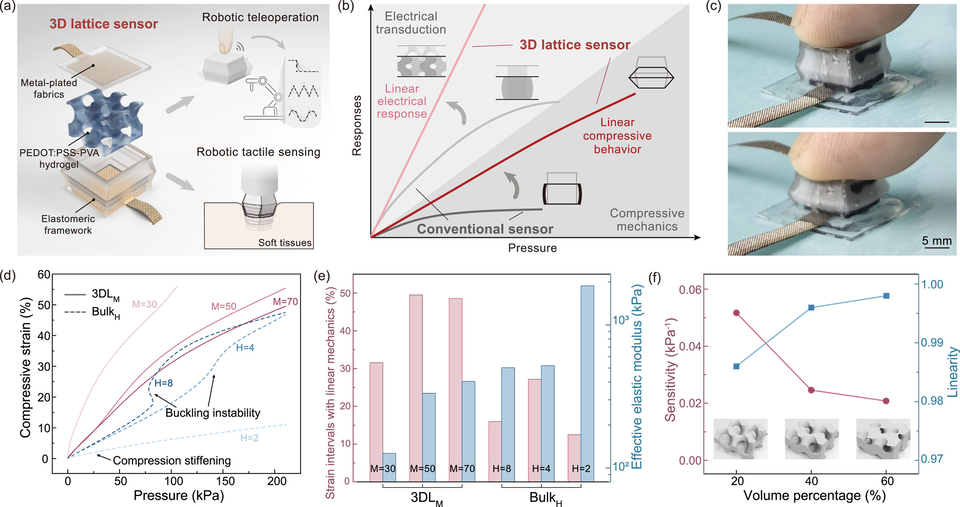
연구팀은 전도성 고분자 물질(PEDOT:PSS-PVA)을 이용해, 내부가 비어 있는 3차원 격자 구조를 설계했다. 특히 하이드로젤을 얼리면서 출력하는 ‘초저온 프린팅(Cryo-printing)’ 기법을 적용해, 오리가미(종이접기) 형태의 프레임 안에 이 격자 구조를 삽입하는 데 성공했다.
이렇게 만들어진 3D 센서는 외부에서 압력을 받으면 내부의 격자 구조가 순차적으로 무너지면서 전극과의 접촉 면적을 일정하게 늘려나간다. 이를 통해 약한 힘이든 강한 힘이든 똑같은 정확도로 감지할 수 있다.
연구팀은 이 센서를 로봇 팔에 부착해 성능을 검증했다. 실험 결과, 로봇은 복잡한 신호 파형을 정확하고 안정적으로 제어하며 원격 작업을 수행했다. 또한, 센서가 부착된 ‘지능형 손가락’은 부드러운 조직의 탄성을 정확하게 감지해냈다.
구잉 구 교수는 “기존의 2차원 구조 센서들과 달리, 우리의 3차원 구조는 인지 능력의 차원을 근본적으로 끌어올린다”며 “향후 추가적인 구조 설계를 통해 다축(multi-axis) 변형을 ‘서로 간섭 없는’ 다중 모드 신호로 변환하는 것도 가능하다. 이는 소프트 로봇에 진정한 감각 능력을 부여할 수 있는, 촉각에 대한 완전히 새로운 접근 방식이다”라고 말했다.
백승일 기자 robot3@irobotnews.com