[화제 영상]서울대ㆍUC버클리, 점핑 바퀴벌레 로봇 개발조규진교수팀,'IEEE ICRA 2016'서 발표
승인 2016.05.27 15:23:29
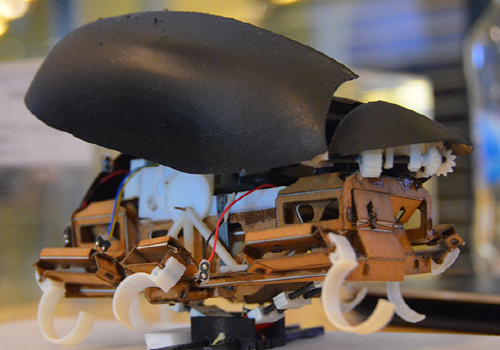
서울대가 개발한 바퀴벌레 로봇 (사진=IEEE 스펙트럼)
서울대 조규진 교수팀은 UC버클리와 공동으로 1.6m까지 점프할 수 있는 바퀴벌레 로봇 ‘점프로우치(JumpRoACH)‘를 개발했다고 'IEEE 스펙트럼'이 보도했다. 바닥을 기어다니다가 장애물이나 책상 처럼 높은 곳을 만나면 바로 도약하는 게 가능하다.
이번 연구 성과는 최근 스웨덴 스톡홀롬에서 열린 ’IEEE ICRA 2016'에서 발표됐다.곤충을 모사한 종전의 점핑 로봇은 주로 스프링 메카니즘을 활용한다. 스프링과 걸쇠가 있어 걸쇠가 풀리면 스프링이 작동하는 2진법적인 기계적인 메카니즘이다. 하지만 스프링 메카니즘은 걸쇠가 풀리면서 축적된 에너지가 한꺼번에 분출되기 때문에 도약할 수 있는 거리를 임의로 조작하는게 힘들다.
이번에 서울대 연구팀이 개발한 점핑하는 바퀴벌레 로봇은 아주 짧은 거리를 도약하거나 항공기 발사장치 처럼 큰 힘을 발휘해 도약하는 것을 조작하는 게 가능하다. 서울대팀은 UC버클리 연구진과 협력해 6족 곤충 로봇인 ‘대쉬(DASH)'에 점핑 메카니즘 기술을 적용했다. ’점프로우치’는 무게 60g의 소형 로봇이지만 무려 1.6m를 점프할 수 있다. 점프 후 몸체가 옆으로 기울어지더라도 곧 바로 몸을 원래의 위치로 복원할 수 있다.
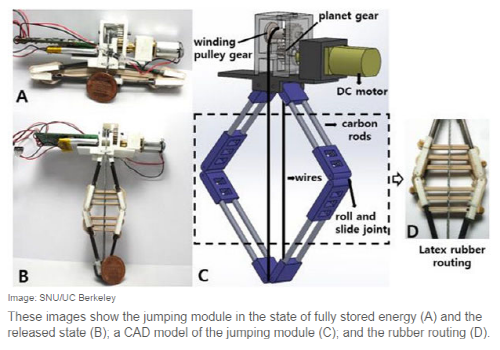
점핑 메카니즘을 구현하는 기계장치는 다이아몬드 형태의 4개의 연결막대로 구성되어 있어 일종의 관절 역할을 한다. 여기에 부착된 8개의 라텍스 밴드와 와이어, 도르래, DC모니터,유성 기어 등이 힘을 합쳐 점핑할 수 있는 에너지를 만들어 분출한다. 로봇 모듈 자체적으로는 수직으로 3m가량 점프할 수 있지만 대쉬안에 넣어 테스트했을 경우 1.1m에서 1.6m까지 점프할 수 있다.