로봇 팔의 조작을 시연할 경우 로봇 팔이 잠깐이지만 멈춰 있는 시간이 있다. 잠깐 멈춰 있는 시간 동안 로봇의 동작 알고리즘은 팔이 움직일 때 다른 물체와의 충돌 가능성을 계산한다. 충돌이 발생하지 않는 ‘동작 계획(Motion-Planning)’을 수립한 후에 로봇 팔이 동작하는 것이다. 로봇은 동작계획에 많은 시간을 소비한다. 로봇의 동작을 빠르게 하려면 동작계획에 소요되는 시간을 줄여야 한다.
‘IEEE 스펙트럼’에 따르면 미국 듀크대학 연구진은 동작계획에 들어가는 시간을 크게 줄여줄 수 있는 칩 기술을 개발했다. 이 칩을 활용하면 로봇의 동작 효율을 크게 높일 수 있다.
▲ PRM
로봇 팔의 동작계획을 수립하려면 먼저 ‘확률적 로드맵(PRM:probabilistic road map)’을 만들어야한다. PRM은 장애물과 충돌하지 않는 점들의 궤적으로 이뤄진 일종의 그래프다. 점이 연결된 선(line)은 엣지(edge), 로봇 팔의 움직이는 공간은 ‘스웹트 볼륨(swept volume)’이라고 부른다. 동작 계획은 PRM상에서 시작점(starting point)과 끝점(end point)으로 이뤄지는데 가장 효율적인 ‘엣지’의 경로를 계산한다.
듀크대 연구진은 ‘공격적인 사전 컴퓨팅(aggressive precomputation)’ 기술과 ‘대량 병렬기술(massive parallelism)’을 활용해 동작계획에 걸리는 시간을 크게 줄였다. 15만개에 달하는 엣지를 1천개 정도로 줄이는 방식으로 PRM을 만든다. 엣지의 수가 크게 줄어들면서 동작계획에 들어가는 시간을 줄일 수 있다. 연구팀은 이를 FPGA(field programmable gate array) 프로세서에 구현했다. 프로세서는 각 엣지에 상응하는 충돌 탐지 회로를 내장하고 있다. FPGA 프로세서는 픽셀당 50나노초 안에 모든 가능한 잠재적인 충돌 가능성을 파악할 수 있다.
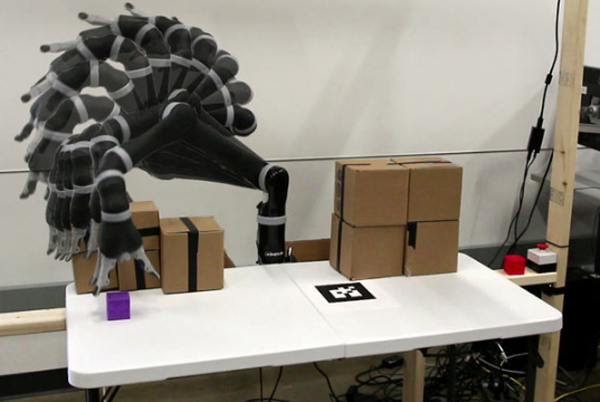
듀크대는 이번에 개발한 칩 기술을 활용해 로봇의 동작 실험을 진행했다. 로봇 팔로 물건을 집어 장애물을 피해 다른 곳으로 움직이는 동작이다. 로봇 팔과 외부에 설치된 비전시스템을 활용해 기술을 테스트 했다. 비전시스템은 장애물과 물건의 위치 정보를 프로세서에 송신하며, 로봇 팔은 수신된 데이터를 기반으로 동작계획을 수립한후에 머뭇거림 없이 물건을 집어 옮기는 동작을 실행한다. 연구자가 로봇 실행 버튼을 누른 후 실시간으로 동작에 들어간다. 듀그대 연구진은 이번에 개발한 기술을 스타트업인 ‘리얼타임 로보틱스’를 통해 상용화할 계획이다.