평균대 위에서 균형을 잡으며 걷는 4족 보행 로봇카네기멜론대, 2023 ICRA서 연구 성과 발표
승인 2023.04.18 15:00:00
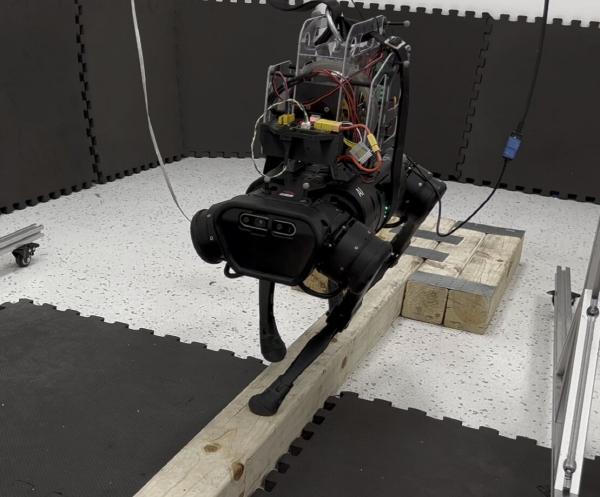
▲ 평균대 위를 걷는 4족 보행 로봇(사진=CMU)
美 카네기멜론대 로봇연구소(Robotics Institute) 연구팀은 4족 보행 로봇이 매우 좁은 평균대 위에서 균형을 잡으며 걸을 수 있는 시스템을 설계했다고 17일 밝혔다.
이 과제를 수행한 자카리 멘체스터 교수는 “이번 실험은 대단했다”며, “이전에 로봇이 평균대 위를 성공적으로 보행하는 데 성공한 사람은 없다고 생각한다”고 말했다.
연구팀은 4족 보행 로봇의 후면에 ‘반응 휠 액추에이터’(RWA· reaction wheel actuator) 시스템을 장착해 평균대 위 보행 실험을 성공적으로 수행했다. RWA는 새로운 제어기술의 도움을 받아 로봇이 발 위치와 상관없이 독립적으로 균형을 맞출 수 있도록 한다. RWA는 우주항공산업에서 우주선의 각운동량(angular momentum)을 조작해 위성의 자세 제어를 수행하는 데 폭넓게 사용된다.
연구팀은 유니트리 로보틱스의 4족 보행 로봇 ‘A1’에 2개의 RWA(하나는 피치 축에, 하나는 롤 축에)를 장착해 로봇의 각운동량을 제어하는 접근 방식을 채택했다. RWA를 활용하면 신체의 위치를 독립적으로 제어할 수 있어 로봇의 다리가 지면과 접촉하는지 여부는 중요하지 않다는 설명이다.
연구팀은 이번 연구 성과를 오는 5월 29일부터 6월 2일까지 영국 런던에서 열리는 국제로봇학술대회 ‘2023 ICRA(International Conference on Robotics and Automation)’에서 발표할 예정이다.