美 NC주립대 연구팀, 애벌레 닮은 소프트 로봇 개발‘사이언스 어드밴시스’에 연구 성과 발표
승인 2023.03.23 14:35:38
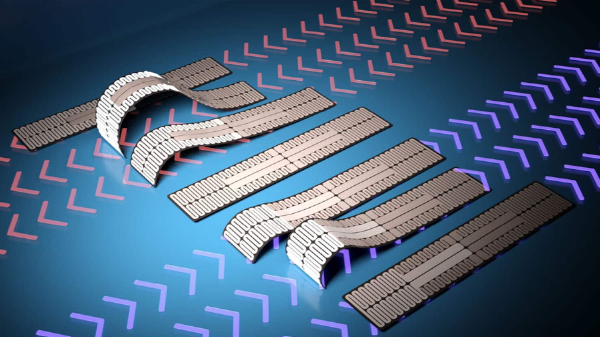
▲ 미국 노스캐롤라이나(NC)주립대 연구팀이 앞뒤로 움직이고, 좁은 공간를 뚫고들어갈 수 있는 애벌레 로봇을 개발했다.(사진=NC주립대)
미국 노스캐롤라이나(NC)주립대 연구팀이 애벌레 처럼 앞뒤로 움직이고, 좁은 공간를 뚫고 들어갈 수 있는 소프트 로봇을 개발했다고 22일(현지 시각) 밝혔다.
애벌레 로봇의 동작은 로봇에 내장돼 있는 은 나노와이어의 새로운 패턴에 의해 구동된다. 은 나노와이어에 열을 어떻게 가하느냐에 따라 로봇의 움직임이 달라진다. 사용자는 로봇을 어느 방향으로든 조종하는 게 가능하다.
앤드류 애덤스 NC주립대 기계 및 항공우주공학과 교수는 “애벌레의 동작은 몸의 국소적인 굴곡에 의해 조절된다. 애벌레가 몸을 앞으로 당길 때는 몸이 뒤로 밀 때와는 다르게 구부러진다”며 “우리는 애벌레의 생체역학에서 영감을 받아 국소적인 굴곡을 모방하고, 유사한 굴곡과 동작을 제어하기위해 애벌레 로봇에 나노와이어 히터를 채택했다”고 말했다.
연구팀은 "나노와이어 히터는 두 가지 방법으로 로봇의 움직임을 제어할 수 있도록 해준다. 우리는 소프트 로봇의 발열 패턴을 제어함으로써 로봇의 어느 부분이 구부러지는지 제어할 수 있으며, 적용되는 열의 양을 제어함으로써 구부러지는 정도를 제어할 수 있다"고 설명했다.
애벌레 로봇은 열에 노출되었을 때 다르게 반응하는 2개층의 중합체(폴리머)로 구성되어 있다. 하부층은 열에 노출되면 수축하며, 상부층은 팽창한다. 은 나노와이어 패턴은 중합체의 팽창층에 내장되어 있다. 이 패턴은 전류를 인가할 수 있는 여러 개의 리드 포인트(lead point, 유도점)를 포함하고 있다.
연구팀은 서로 다른 리드포인트에 전류를 인가해 나노와이어 패턴의 어느 부분이 가열되는지 제어할 수 있으며, 전류의 흐름을 조절해 발열량을 제어할 수 있다. 애벌레 로봇에 더 많은 전류를 인가할수록 로봇은 더 빠르게 이동한다.
연구팀은 이번 연구 성과를 전문 학술지인 ‘사이언스 어드밴시스’에 발표했다(논문 제목:Caterpillar-Inspired Soft Crawling Robot with Distributed Programmable Thermal Actuation). 이번 연구는 국립과학재단의 지원을 받아 수행되었다.