|
KAIST는 전기및전자공학부 노용만 교수 연구팀이 물체를 검출하는 딥러닝 신경망에 대한 적대적 공격을 방어하는 알고리즘을 개발했다고 15일 밝혔다.
최근 몇 년간 인공지능 딥러닝 신경망 기술이 나날이 발전하고 실세계에 활용되면서, 딥러닝 신경망 기술은 자율주행 및 물체검출 등 다양한 분야에서 떠오르는 핵심기술로 주목받고 있다.
하지만 현재의 딥러닝 기반 검출 네트워크는, 특정한 적대적 패턴을 입력 이미지에 악의적으로 주입하여 잘못된 예측 결과를 초래하는 적대적 공격에 대해 심각하게 취약하다. 적대적 패턴이란 공격자가 검출이 되지 않기 위해 인위적으로 만든 패턴이다. 이 패턴이 포함된 물체는 검출이 되지 않게 하는 것으로 적대적 패턴 공격이라 한다.
이러한 취약성은 인공지능으로 대표되는 딥러닝 기반의 모델을 국방이나 의료 및 자율주행 등 국민의 생명과 재산을 직접 다루는 분야에 적용할 때 크게 문제가 된다. 구체적인 예로 국방·보안을 위한 감시 정찰 분야에서 적군이 적대적 패턴으로 위장하여 침입하면 검출을 못하는 경우가 발생하여 국방 및 보안에 매우 큰 위험을 초래할 수 있다.
기존의 많은 연구가 적대적 패턴 공격을 막기 위해 노력했으나 추가로 복잡한 모듈이 필요하거나 네트워크를 처음부터 다시 학습해야 했기 때문에, 기존 연구는 실시간으로 동작하는 물체검출 알고리즘에 현실적으로 적용하기가 쉽지 않았다.
노 교수 연구팀은 물리적인 환경에서 적대적 패턴 공격의 원리를 반대로 이용해 적대적 공격을 막아내는 방어 프레임을 고안했다. 이러한 방어 프레임은 부가적인 복잡한 모듈이나 네트워크의 재학습이 필요하지 않으므로 보다 실용적이고 강인한 물체검출 네트워크를 구축하는데 폭넓게 응용 및 적용될 수 있을 것으로 기대된다.
공동 제1 저자인 KAIST 전기및전자공학부 유영준 박사과정 학생과 이홍주 박사과정 학생 등이 함께 수행한 이번 연구는 영상처리 분야 최고의 국제 학술지인 `IEEE Transactions on Image Processing'에 11월 1일 자로 온라인 게재됐다. (논문명 : Defending Person Detection Against Adversarial Patch Attack by using Universal Defensive Frame).
연구팀은 문제 해결을 위해 적대적 공격의 원리를 역으로 이용해, 학습된 네트워크에 접근하지 않으면서도 입력단에서 방어할 수 있는 방어 프레임 기술을 고안했다.
| |
 |
|
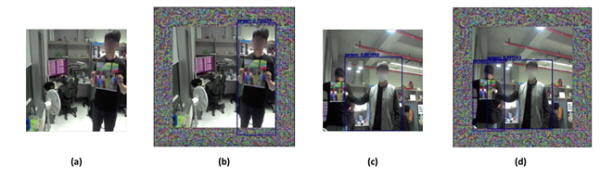
| ▲ (a) 물리적인 환경에서 적대적 위장 패턴 공격을 당했을 때를 나타낸다. (b) 제안하는 방어 프레임으로 (a)상황을 방어했을 때를 나타낸다. (c) 공격받지 않은 사람과 함께 있을 때를 나타낸다. (d) 제안하는 방어 프레임으로 (b)상황을 방어했을 때 정상적으로 검출 된다. |
| |
 |
|
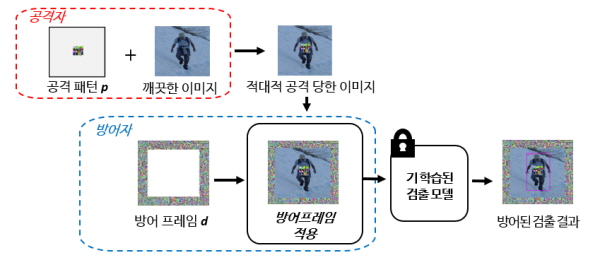
| ▲ 적대적 공격에 대하여 방어 프레임을 통해 방어하는 과정을 도식화한 이미지. 공격자는 적대적 패턴으로 검출 모델을 동작 못하게 한다. 방어 방법으로 입력 영상에 방어 프레임 를 씌워 검출 모델에 입력시키면 방어가 된다. 기 학습된 검출 모델을 그대로 사용하면서도 방어를 할 수 있다. |
| |
 |
|
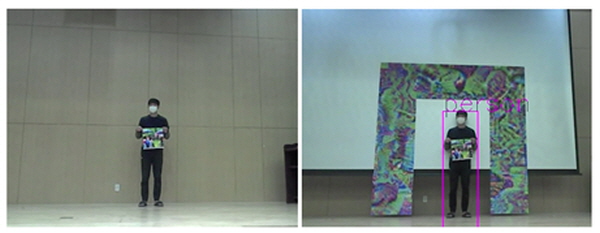
| ▲ 방어 프레임을 물리적 환경으로 구현했을 때 이미지: (왼쪽) 물리적 방어 프레임이 없을 때 적대적 공격으로 인해 검출되지 않는다. (오른쪽) 물리적 방어 프레임으로 인해 적대적 공격을 방어하여 성공적으로 검출할 수 있다. |
연구팀의 방어 기술은 적대적 공격과 정반대로 물체검출 시 딥러닝 모델이 옳은 예측 결과를 내리도록 방어 프레임을 만드는 것이다. 이러한 방어 프레임은 마치 창과 방패의 싸움처럼 적대적 패턴과 함께 경쟁적으로 학습되며, 해당 과정을 반복해 최종적으로 모든 적대적 패턴 공격에 대해 높은 방어성능을 지니도록 최적화된다.
연구팀은 입력 이미지 외부에 덧붙이는 방어 프레임을 변화시킴으로써 손쉽게 방어성능을 조절할 수 있음을 확인했고, 개발된 방어 프레임은 인리아(INRIA) 검출 벤치마크 데이터셋에서 기존 방어 알고리즘 대비 평균 31.6% 정확도가 향상하는 성과를 거뒀다.
연구팀이 개발한 방어 프레임은 실시간 물체 탐지 시, 모델의 재학습 없이 적대적 패턴 공격을 방어할 수 있으므로 예측 시간 및 비용 절감을 크게 이룰 수 있을 것으로 기대된다.
연구팀은 나아가 이번 연구에서 개발된 방어 프레임을 물리적으로 직접 구현시켜서, 물리적 환경에 자연스레 놓여있는 적대적 패턴 공격과 마찬가지로 좀 더 접근성 있는 방어 방법으로도 활발히 응용될 수 있음을 제시하였다.
노용만 교수는 "국방 및 보안 분야에서 인공지능이 활용되기 위해서 아직 인공지능의 완전성을 높이는 많은 연구가 필요한데, 이번에 개발된 방어 기술은 이 분야들에서 인공지능 모델을 적용 시 실용적인 적대적 방어를 제시함에 의의가 있을 것ˮ이라며 "이 기술은 국방 감시정찰, 보안, 자율주행 분야에도 적용될 수 있을 것이다ˮ라고 말했다.
한편 이번 연구는 방위사업청과 국방과학연구소의 지원으로 한국과학기술원 미래국방 인공지능 특화연구센터에서 수행됐다. |
















