| |
 |
|
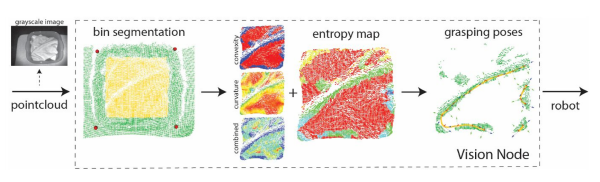
| ▲ 옷의 주름 감지 알고리즘 |
이탈리아 볼로냐대학 연구진은 스웨덴 가전기업인 일렉트로룩스와 협력해 세탁소에서 사람의 세탁 일을 도와주는 새로운 로봇시스템을 개발했다고 테크엑스플로어가 10일(현지 시각) 보도했다.
이 로봇시스템은 세탁물을 세탁기에 넣은 후 세탁기를 조작하고, 세탁이 끝나면 세탁물을 꺼내는 등 여러 동작을 수행한다. 연구팀은 전문 저널인 ‘휴먼-프렌들리 로보틱스’에 논문을 발표했다.
볼로냐대 '자동화ㆍ로봇연구소(LAR·Laboratory of Automation and Robotics)'는 그동안 로봇 매니퓰레이션에 관한 광범위한 연구를 수행해왔다. 최근 몇 년간 이 연구소 소속 로봇 과학자들은 로봇 손 설계, 스위치기어 배선 또는 변형 가능한 물체의 조작을 위한 새로운 방법 등 유망한 시스템을 소개했다.
볼로냐대 LAR 연구진은 지난 2017년부터 일렉트로룩스와 협업을 시작했다. 협력 프로젝트의 주요 목표는 세탁 작업을 자동화할 수 있는 로봇시스템(인식 파이프라인과 제어 알고리즘)을 개발및 평가하는 것이다.
| |
 |
|
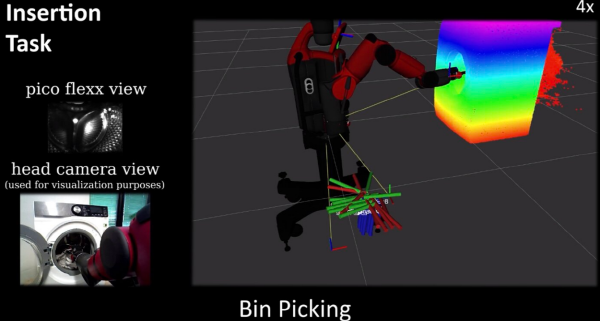
| ▲ 로봇팔이 옷을 집어 세탁기에 넣는 과정 |
LAR와 일레트로룩스 연구진의 연구 목표는 궁극적으로 세탁소에 있는 인간 작업자를 완전 자율 이동로봇팔로 대체하는 것이다.
의류들은 형태의 변형이 심하기 때문에 로봇이 의류를 다룬다는 것은 매우 힘든 일이다. 세탁 작업을 수행하는 로봇 시스템은 여러 단계를 거쳐야 한다. 세탁이 필요한 옷을 감지해 세탁기에 투입하고, 세탁기 디스플레이에 표시되는 정보를 해석해 세탁기의 기계적인 설정을 바꿔야 한다. 세탁물을 세탁기에 성공적으로 집어넣고, 드럼 세탁기의 문에서 옷을 회수하는 일련의 단계들은 연구팀이 제안한 시스템의 성공을 보장하는 핵심 부분이다.
연구진은 의류의 종류를 파악하고, 조작 능력을 제고하기 위해 포인트 클라우드 기반 인식 알고리즘을 개발했다. 이 알고리즘은 옷감 표면의 주름을 감지하고, 주름을 따라 형성되어 있는 곡선 부분을 계산하고, 최적의 파지(grasping) 프레임을 추정한다. 연구팀은 이와 함께 로봇 세탁 작업을 완전히 자동화할 수 있는 딥러닝 기반 세탁기 사용자 인터페이스와 해석 알고리즘을 개발했다.
연구진은 2개의 로봇 플랫폼인 티아고와 백스터 로봇, 그리고 AEG 세탁기를 사용해 테스트를 진행했다. 3D ToF 카메라로 캡처한 옷의 주름과 색깔 등을 고려해 실시간 포인트 클라우드에서 사람처럼 옷감을 파지하는 방법을 도출해낸다. |
















