| |
 |
|
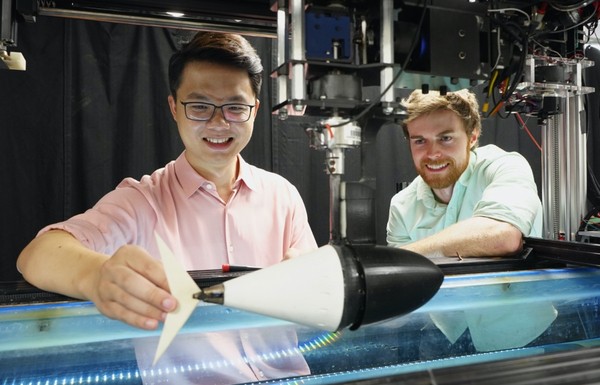
| ▲ 로봇 참치가 꼬리 부분의 강성을 조정하면서 유영하는 모습(사진=버지니아대) |
美 버지니아대 공대 연구팀이 수중에서 속도를 조절할 수 있는 로봇 참치를 개발했다고 11일(현지 시각) 밝혔다.
버지니아대 공대 ‘단 퀸’ 교수는 치앙종(Qiang Zhong) 박사후 연구원과 공동으로 다속(multispeed) 미션을 수행할 수 있는 핵심 로봇 기술을 개발하고, 이 기술을 적용한 로봇 참치를 제작했다. 이번 연구 성과는 전문 저널인 ‘사이언스 로보틱스’에 게재됐다.
연구팀에 따르면 수중 이동장치들(수중 로봇, 수중 차량 등)은 단일의 속도만으로 움직이는 경우가 많다. 이들 수중 이동장치들은 대양에서 빠른 속도로 움직이지만, 산호초 주변 지역 지도를 만들기 위해 또는 기름 유출 지역 해양 수질을 정밀 측정하기 위해 속도를 빨리 낮춰야 하는 데 쉽지 않다.
이에 비해 물속에 사는 물고기들은 자유자재로 이동 속도를 조절할 수 있다. 물고기들은 물속에서 꼬리 부분의 ‘강성(stiffness)’을 실시간으로 조정해 속도를 조절하는 것으로 알려지고 있다.
단 퀸 교수는 “하나의 꼬리 강성을 갖는다는 것은 마치 하나의 '기어비(gear ratio)'를 갖고 있는 자전거와 같다”면서 “고정 기어를 갖고 있는 자전거를 이용해 샌프란시스코 지역을 돌아다니면 몇 개 블록 지나지 않아 기진맥진해질 것이다”라고 말했다.
다중 속도로 움직이는 수중 로봇 설계시 난점은 물속에서 추진력을 발휘하는 로봇 물고기의 꼬리 부분 강성을 어느 수준으로 해야하는지 결정하는 게 힘들다는 점이다. 또한 유영하는 물고기의 꼬리 강성을 측정할 수 있는 알려진 방법이 없기 때문에 물고기가 왜 이런 행동을 하는지, 어떻게 하는지 알 수 없다.
| |
 |
|
| ▲ 버지니아대 연구팀이 개발한 로봇 참치(사진=버지니아대) |
버지니아대 연구팀은 유체역학과 생체역학을 결합해 꼬리 부분의 강성을 어떻게 조정해야 하는지에 관한 모델을 도출했다. 연구팀은 이 문제를 수학적으로 해결했는데 “꼬리의 강성은 유영 속도의 제곱에 따라 증가해야 한다"는 가설을 만들고 입증했다.
연구팀은 자신들의 이론을 입증하기 위해 프로그래밍이 가능한 인공 힘줄을 사용해 유영 도중 꼬리의 강성을 조절할 수 있는 로봇 참치를 제작했다. 이 로봇을 이용해 테스트한 결과 고정적인 강성의 꼬리를 갖고 있는 로봇 물고기의 절반 정도 에너지로 다양한 속도로 조절하면서 유영을 할 수 있다는 것을 확인했다.
| |
 |
|
| ▲ 로봇 참치의 구조 |
연구팀이 제작한 로봇 참치는 길이 14인치로, 실제 참치처럼 꼬리를 요동치면서 시간당 1.5마일의 속도로 이동할 수 있다. 로봇은 크게 머리 부분과 꼬리 부분으로 구성되어 있으며 꼬리 앞 부분에 엑추에이터를 장착했다. 꼬리의 관절을 진동하는 방식으로 이동한다.
연구팀은 "이번 연구는 생체역학, 유체역학, 로봇공학을 접목해 꼬리의 강성을 종합적으로 연구한 첫 번째 사례로, 꼬리의 강성이 유영 능력에 어떤 영향을 미치는지에 대한 오랜 미스터리를 규명하는 데 도움이 된다"고 말했다. 또한 "환상적인 것은 우리가 이론 분석에만 집중한 것이 아니라 강성의 조정에 관한 실질적인 가이드를 제안하고 있다는 것“이라고 지적했다.
연구팀은 이번 로봇 참치 연구를 기반으로 향후 돌고래나 올챙이 등 여러 모양과 크기의 로봇을 제작하고, 가오리의 요동을 모방한 로봇 개발도 추진하겠다는 계획이다. |
















