| |
 |
|
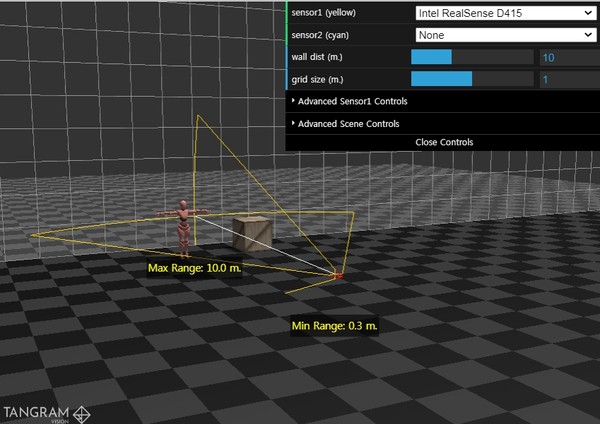
| ▲ 탱그램 비전의 3D센서 시각화 도구 |
미국 샌프란시스코 소재 로봇용 센서통합 및 최적화 전문 스타트업인 탱그램 비전(Tangram Vision)이 심도센서 시각화(Depth Sensor Visualizer) 도구를 출시했다고 밝혔다. 대화형 도구를 사용해 3D센서를 빠르게 비교 및 분석할 수 있어 로봇 개발자들이 적합한 3D 센서를 빨리 선택할 수 있도록 해준다.
이 도구를 사용하면 하나 또는 2개의 3D 센서를 선택해 센서의 최소 작동 범위, 최대 작동 범위, 수평 시야각, 수직 시야각 및 대각선 시야각을 즉시 분석 및 비교할 수 있다.
심도 센싱은 근거리 장애물 회피, 물체감지, 물체식별 등 다양한 핵심 기능을 드론과 로봇에 제공한다.심도 센서부터 획득되는 3D 데이터 스트림은 슬램(SLAM) 및 시각관성주행거리계(VIO·Visual inertial odometer) 등 내비게이션 시스템에 필요한 핵심적 입력 요소다. 이 시각화 도구는 인텔 리얼센스 D 제품군, 후두부(Occipital) 구조코어, MYNT 아이 계열, pmd 피코 계열, 마이크로소프트 애저 키넥트 제품군 등 다양한 센서를 비교분석할 수 있다.
탱그램 비전의 공동 창업자겸 COO인 아담 로드니츠키(Adam Rodnitzky)는 “이전에는 3D 센서가 비싸고, 까다롭고, 찾기도 어려웠다. 최근 5년간 모든 것이 바뀌었다. 일부 제조업체는 모든 시장에 적합한 센서를 만들기 위해 노력하고 있고, 다른 제조업체는 로봇이나 AR/VR 헤드셋과 같은 특정 시장에 맞는 센서를 내놓으면서 센서의 사양이 아주 다양해졌다"고 했다. 문제는 이처럼 센서가 많아지면서 선택하는 게 힘들어졌다는 것이다.
탱그램 비전은 최근 2021년 인식센서 산업지도도 작성했다. 회사 관계자는 "로봇 개발자들에게 ‘심도’는 근거리 및 중거리 내비게이션 또는 장애물 회피 등을 위해 많이 활용된다. 이같은 시나리오에서 센서의 작동 범위와 시야는 심도 센서가 로봇 애플리케이션에 적합한지 아닌지를 결정하는 데 중요한 사양이다“라고 말했다.
하지만 "불행히도 이에 관한 정보는 쉽게 찾기 힘들고, 한 곳에서 찾아보기도 어렵다. 탱그램의 시각화 도구는 심도 센서들을 보다 쉽게 비교할 수 있다. 로봇 개발자들은 심도 센서의 작동 범위와 시야를 쉽게 시각화하고 비교함으로써 어떤 모델을 선택할지 빠르게 파악할 수 있다"고 말했다. |
















