|
'젊은 로봇 공학자(Young Robot Engineer)' 코너는 한국로봇학회와 로봇신문이 공동으로 기획한 시리즈물로 미래 한국 로봇산업을 이끌어 갈 젊은 로봇 공학자를 발굴해 소개하는데 있다.
45번째 인터뷰는 한양대 김완수 교수다. 김 교수는 1986년생으로 부천고를 나와 한양대 ERICA 기계공학과를 졸업하고 2008년 3월 동대학원 석박사 통합과정에 진학해 2015년 2월 기계공학으로 박사 학위를 받았다. 대학 재학 중인 2006년 8월부터 2008년 2월까지 한양대 첨단로봇연구실(CIM&Robotics Lab)에서 인턴 연구원, 2008년 3월부터 2015년 2월까지 보조연구원으로 있으면서 4족 로봇 개발, 하지 외골격 로봇 개발에 참여했다. 박사 졸업후에는 2015년 3월부터 2016년 2월까지 1년간 한양대 ERICA 캠퍼스 공학기술연구소(교수 한창수), 2016년5월부터 2021년 2월까지 약 5년간 '이탈리아공학연구소(IIT:Istituto Italiano di Tecnologia)'에서 박사후 연구원으로 근무했다. 올해 3월부터 한양대 ERICA 캠퍼스 로봇공학과 조교수로 근무하고 있는 새내기 교수다.
주요 관심 분야는 협동 로봇 또는 물리적 인간-로봇 상호작용(pHRI), 인간-로봇 협업, 공용제어, 인체공학, 휴먼 모델링, 피드백 디바이스, 외골격 로봇 등이다. IIT 재직중에는 호라이즌(Horizon)-2020 프로젝트 '소피아(SOPHIA)'와 유럽연구회 프로젝트인 '에르고-린(Ergo-lean)'에 참여했으며, 국내에서는 다수의 외골격 로봇 연구(산업 현장 작업자 지원용 웨어러블 로봇 등) 개발에 기여했다. 2014년 ICCAS 최우수 논문 발표상, 2015년 한양대 최우수 박사 논문상, 2018년 쿠카(KUKA) 이노베이션 어워드 1위, 2019년 이탈리아 솔루션 어워드 1위 등을 수상했다.
Q. 최근 하고 계신 연구가 있다면 소개 부탁드립니다.
저는 올해 3월에 한양대학교 ERICA 로봇공학과에 조교수로 임용되었고, 이제 막 새로운 연구주제를 정하고 있는 단계입니다. 저의 주 연구 분야는 협동 로봇 또는 외골격 로봇을 활용하는 인간-로봇 상호작용에 관한 연구입니다. 인간-로봇 상호작용(human-robot interaction)이라는 주제는 현재 광범위하게 사용되고 있지만, 특히 저는 로봇과 협업을 하는 작업자에게 물리적인 도움을 제공하기 위한 폐 루프(closed loop)로 구성된 인간-로봇 상호작용의 모델링 및 이를 이용하는 제어프레임워크 (control framework)에 관하여 연구하고 있습니다.
인간-로봇 상호작용 분야와 관련하여 제가 수행하는 연구는 크게 두 개의 주제로 나누어 볼 수 있습니다. 첫 번째는 2015년 박사학위를 취득하기 전까지 한양대학교에서 수행한 연구인, 작업자나 군인 등의 일반인을 대상으로 하는 외골격 로봇에 관한 연구이며, 두 번째는 2016년 부터 2021년 까지 이탈리아 공학연구소인 Istituto Italiano di Tecnologia(IIT)에서 수행한 협동 로봇을 활용한 공장작업자의 근력 및 인간공학적 보조를 위한 상호작용 모델링과 이를 기반으로 하는 제어에 관한 연구로 나누어 볼 수 있습니다. 두 가지 연구 주제 모두 인간-로봇 상호작용 연구를 기반으로 하는 연구로서, 인간-로봇 상호작용은 제 연구 기간 전체를 아우르는 주제입니다.
특히 가장 최근까지 진행해 온 연구이고 지속할 내용으로는 인간공학적 요소가 가미된 인간중심의 인간-로봇 협업이며, 협동 로봇 또는 모바일 머니퓰레이터를 활용한 제어프레임워크를 개발하는 것입니다. 인간공학이란 산업 환경, 즉 공장과 같은 곳에서 작업자의 인체 특성을 고려하여 시스템, 환경의 효율적인 구성을 통해 기존보다 작업자의 편의를 향상하기 위한 과학적 접근법으로, 일반적인 예로는 공장과 같은 험한 환경에서 작업자의 자세, 반복적 부하 등의 위험 요소를 분석하고 근골격계질환을 예방하기 위해서 활용됩니다. 저는 이러한 아이디어를 인간-로봇 상호작용연구 분야와 처음 접목하여 새로운 연구 분야로 소개하였습니다.
제안된 방법에 사용되는 기술은, 협동 로봇이 센서를 통해서 인간의 현재 자세와 작업물 등을 실시간으로 파악하고, 직접 개발한 인체공학 모델을 통해 작업자에게 편안하고 부담이 적은 최적의 자세를 실시간으로 제안해 주며, 이를 통해서 협동 로봇은 작업자에게 피로나 부담을 적게 주는 인간공학적인 자세에서 협업 작업을 수행할 수 있도록 최적화된 자세 및 경로를 로봇이 동작하게 되어, 협동로봇이 마치 친숙한 협동작업자와 같이 행동하도록 합니다. 이와 관련된 연구내용은 아래 동영상 링크를 통해서 더 자세히 보실 수 있습니다(https://youtu.be/F0yf8Kf6WpM). 이와 같은 제어 프레임워크는 고정형 협동로봇 뿐만 아니라, IIT 그룹에서 개발한 모바일 머니퓰레이터인 MObile Collaborative robotic Assistant(MOCA) 를 통해 확장되어 하나의 로봇이 여러 작업자와 협력함과 동시에 각각 작업자들에 맞춰진 인간공학적 자세를 제공할 수 있도록 개발해오고 있습니다.
인간 공학적 협업 제어는 로봇 연구 분야에서 매우 새로운 주제이지만 인간과 로봇의 지속 가능한 협업을 위한 방안으로 점차 중요한 요소로 인식되고 있으며, 유사한 연구들도 증가하고 있습니다. 저는 2016년 이러한 연구방법을 ICORR 2016에 소개한 이후 ICRA, IROS와 같은 주요 로봇학술대회에서 논문을 꾸준히 발표해오고 있으며, 특히, 2018년부터 매년 ICRA 또는 IROS에서 인체공학 인간 로봇 상호작용(Ergonomic human robot interaction)이라는 주제로 워크숍을 기획하여 유사한 연구를 하는 각국의 연구자들과 함께 이 연구에 대한 소개와 논의를 하며 관련 분야를 발전시키고 있습니다. 또한, 2018년도에는 세계적인 산업용 로봇 생산 업체인 KUKA에서 주최하는 국제대회인 쿠카 이노베이션 어워드(KUKA innovation award)에 출전하였고 1위로 수상을 하며 학계뿐만 아니라 산업계에서도 많은 관심을 받았습니다.
2. 한양대에서 “Human Synchronized Gait Control of the HEXAR-CR50 to Augment Lowe Body Strength Based on the Human-Robot Interaction Force”를 주제로 박사 학위를 받으셨는데 어떤 내용인지 소개 부탁 드립니다.
2006년 처음 한양대학교 첨단로봇연구실에서 한창수 교수님의 지도하에 외골격 로봇 연구를 시작할 때부터 2015년 까지 진행한 Hanyang Exoskeleton Assistive Robot(HEXAR:한양외골격지원로봇)라는 하지 외골격로봇 기술 개발에 대한 내용을 집약한 내용으로, 인간 중심의 외골격 로봇 및 인터페이스 설계 기술, 인간-로봇 상호작용력 모델링 및 제어 전략 기술 개발 내용을 포함하고 있습니다.
| |
 |
|
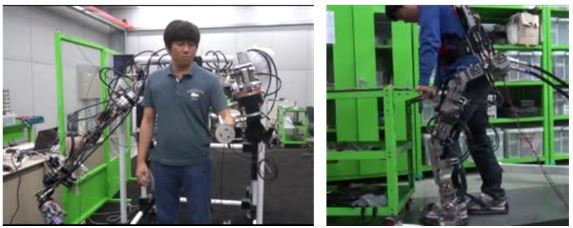
| ▲ 하지형 외골격 로봇 Hanyang Exoskeleton Assistive Robot (HEXAR) 연구 개발 |
외골격 로봇의 설계 중점요소는 관절 동작 범위, 관절 힘 등의 인체 동작 분석이며 이를 통해서 착용자가 안전하게 외골격 로봇과 상호작용할 수 있도록 설계하는 방법을 제시하였고, 동작 분석을 통해 설계에 필요한 인체 하지 관절의 동작 범위, 관절의 역할을 이해할 수 있고, 분석된 데이터는 하지 외골격 로봇의 관절 동작 범위(Range of motion, RoM), 관절 동작 방법[(수동형 Active joint(액티브 조인트), 능동형 Passive joint(패시브 조인트)] 설계에 기초로 활용하였습니다.
두 번째는 상호작용력의 모델링 및 제어 전략으로, 인간과 로봇이 함께 동일한 작업 동작을 수행하기 위해 필요한 인간의 동작 의도 파악 및 의도에 순응하는 로봇의 동작 제어 방법이 포함됩니다. 제가 주로 개발한 일반인 대상의 근력증강용 외골격 로봇의 경우, 인간의 의도를 통해 외골격 로봇의 동작이 완벽하게 일치하도록 제어되어야 하며, 특히 외부 중량물을 이송하는 경우에도 하중 물의 무게감이 착용자에게 전달되지 않으며 동작이 일치돼야 합니다. 이를 위해 착용자의 의도, 즉 인간-로봇 상호작용력(human-robot interaction forces)은 힘/토크 센서를 통해 측정되거나, 외란 관측 기법(disturbance observer)을 통해 예측하였으며, 이렇게 예측된 상호작용력은 힘 제어(force control) 기법을 통해 외골격의 관절 동작이 착용자의 동작(의도)과 정확하게 일치되도록 제어하는 방법을 제시하였습니다. 또한 외골격 로봇의 성능을 평가하기 위해 ‘동기화율’ 이라는 지표를 제시하였고, 개발된 외골격 로봇이 인간의 동작의도에 따라 정확히 동작하는지를 평가하였습니다.
| |
 |
|
| ▲ 현대로템에서 개발한 유압식 상하지 외골격 로봇에 HRI 제어 알고리즘 적용 실험 |
이러한 연구는 또한 다양한 연구·개발 프로젝트(현대자동차, 국방과학연구소, 대우조선해양 등)의 외골격 로봇 개발에도 활용 되었습니다.
3. 물리적 인간-로봇 상호 작용(pHRI:Physical Human-Robot Interaction), 인간-로봇 협업, 외골격 로봇 분야에 관심이 많은 것으로 알고 있습니다. 인간로봇 상호작용과 물리적 인간로봇 상호작용은 어떻게 다르고, 물리적 인간로봇 상호작용이란 무엇인지 궁금합니다.
4차 산업혁명이 처음 소개되고 일반적으로 많이 사용하게 되면서 로봇에 대한 인식의 변화가 있었습니다. 초창기 로봇이 개발될 때는 로봇이 사람의 직업, 작업을 대신하게 되리라 예측했지만, 4차 산업혁명이 소개되면서 대중들의 인식은 인간과 로봇이 동일한 공간에서 생활·작업할 수 있게 된다는 기대로 바뀌게 되었고, 현재의 인식은 인간과 로봇이 상호 보완적인 역할을 하여 지능적이고, 유연한 작업공정을 구성할 수 있을 것이라는 진보된 기술을 기대하고 있습니다. 이와 같은 인식 변화는 인간과 로봇이 서로를 인지, 이해하고 보완할 수 있도록 하는 인간-로봇 협업, 상호작용 분야가 미래 로봇 발전에 핵심 요소로 부각되었습니다.
| |
 |
|
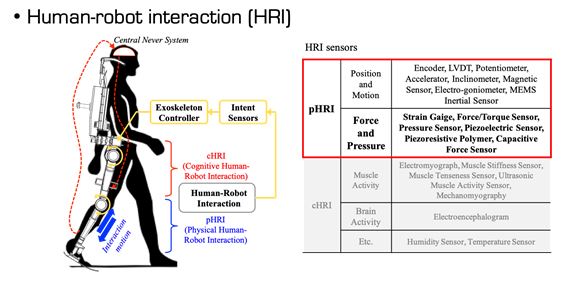
| ▲ Human-Robot Interaction (HRI) 기술 개념 및 분류 |
이러한 인간과 로봇의 상호작용에 관한 기술 분야를 HRI(Human-Robot Interaction)라 부르고 이는 크게 물리적 상호작용 pHRI (Physical HRI)와 인지적 상호작용 cHRI(Cognitive HRI)로 나뉘게 됩니다. 먼저 pHRI는 인간과 로봇의 협업에서 인간-로봇 상호작용력, 즉 인간과 로봇사이에 발생하는 힘의 차이를 센서 등을 통해 측정하고 이를 제어 루프에 반영하는 방법입니다. 주로 말단부 또는 로봇 관절에 힘/토크 센서(FT sensor)를 활용하여 직접적인 힘을 측정하는 방법을 사용하여, 센서에 측정되는 정보가 직관적이고 설치가 쉽다는 장점을 갖고 있습니다. 반면 센서의 정밀도, 민감도에 따라서 인식되는 정보가 차이가 있고, 서로 발생하는 힘의 차이를 이용하기 때문에 즉각적인 반응속도에 둔감하고, 인간의 동작의도와 외부에서 발생되는 외란에 의한 영향을 구분하기 어렵다는 단점이 있습니다.
이와는 다르게 cHRI는 주로 생체신호 센서를 이용하여 로봇 제어 루프에 반영되는 방법입니다. EMG(Electromyography:근전도) 센서, EEG(Electroencephalography:뇌파) 등 인체에서 발생하는 미세 전류의 변화를 측정하고, 이를 전기신호로 전환시키는 센서들을 사용하며, 이를 통해서 중추신경계통에서 움직임의 명령을 내리는 전기신호를 직접 측정하기 때문에 실제 동작이 발생하기 전 동작 의도를 파악하는 것이 가능하다는 점, 그리고 마비환자와 같이 근력이 없는 경우에도 사용이 가능하다는 점이 장점입니다. 반면 개개인의 전기신호의 정량화가 힘들고 노이즈 또는 외란에 매우 민감하기 때문에 별도의 후처리 과정이 필요하다는 점, 신체에 직접적으로 센서를 부착하여 측정되기 때문에 사용이 번거롭다는 점이 단점입니다.
각각의 방법은 목적에 따라 구분되어 외골격 로봇의 기술에 적절하게 활용되고 있습니다. pHRI를 활용한 외골격 로봇은 주로 근력의 증강, 증폭을 위한 목적으로 활용되며, 센서를 외부에 부착하여 활용하고 직관적인 힘의 측정이 가능한 장점으로 주로 일반 작업자 대상의 외골격 로봇기술에 가장 많이 활용되고 있습니다. 반면, cHRI를 활용한 외골격 로봇은 신체에 센서를 부착하더라도 부담이 없고, 불가피하게 신체 내부의 신호를 직접 측정할 수밖에 없는 의료-재활 치료용 외골격 로봇 기술에 활용하여 하지마비 환자의 보행을 다시 가능하도록 하는 기술에 활용되고 있습니다.
Q. 다수의 근력증강 외골격 로봇 개발에 관여하신 것으로 알고 있는데, 외골격 로봇에 대한 최신 동향과 활용 범위, 중요성은 무엇이 있을까요?
대학원기간 그리고 박사후 연구원을 거치면서 다양한 연구·개발 프로젝트(현대자동차, 국방과학연구소, 대우조선해양 등)의 다수 외골격 로봇 개발에 참여하면서 외골격 로봇 기술에 대한 철학을 갖추어 가는데 큰 도움이 되었다고 생각합니다.
외골격 로봇은 현재도 활발하게 연구되고 있으며, 다양한 분야에서 개발되고 있습니다. 초기 근력증강형 외골격 로봇이 인간의 한계를 뛰어넘기 위해 큰 골격과 큰 힘을 내기 위해 개발되었다면, 현재의 외골격 로봇은 기존 외골격 로봇의 한계점을 인지하고, 실현 가능한 수준의 기술을 목표로 하여, 학계뿐만 아니라 대ㆍ중소기업을 중심으로도 착용자(작업자)의 작업 지속성을 높이기 위한 목적에 초점을 맞추어 외골격 로봇이 개발되고 있습니다.
또한 외골격 로봇의 형태도 다양하게 변화해, 강체 형태(rigid exoskeleton)뿐만 아니라 소프트한 형태 (soft exoskeleton)를 갖는 외골격 로봇도 다양하게 개발되고 있습니다. 하지만, 두 외골격 로봇은 서로 대비되는 장단점을 가지고 있습니다. 강체형 외골격 로봇의 경우 강한 힘을 생성할 수 있고, 강체형 외골격을 바탕으로 하중을 착용자에게 전달하지 않는 장점이 있습니다, 하지만, 신체 외부에 강체가 위치하기 때문에 형체 제약이 많으며 착용감(무게, 인터페이스 등)에 대한 부담이 있다는 단점이 있습니다. 반면, 소프트 형태의 외골격 로봇은 소재의 특징을 이용하여 착용 부담을 줄일 수 있으며, 관절이나 링크의 배치 또한 강체형 외골격 로봇보다 유연하다고 할 수 있습니다.
하지만, 로봇이 생성하는 힘을 착용자에게 전달, 또는 반대로 중량물 무게를 로봇이 짊어지고 가기 어렵습니다. 이러한 이유로 강체형 외골격 로봇은 주로 순간적인 힘이 필요한 작업에서 착용자에게 전가되는 하중을 감소시키기 위한 근력 증강용으로 개발되고 있으며, 소프트형 외골격 로봇의 경우 착용자의 근력을 보충, 즉 근지구력을 향상해 반복 작업 등에서 지속적인 작업을 돕기 위한 목적으로 개발되고 있습니다.
각각의 방법은 모두 장단점을 가지고 있고, 다양한 분야에서 각각의 장점을 극대화하기 위해 활발히 연구개발이 되고 있고, 실제 환경에서 활용하는 단계까지 발전했습니다. 이러한 방향에서 가장 중요한 점은 외골격 로봇과 인간의 긴밀한 상호작용에 대한 이해가 중요하다고 생각합니다. 외골격 로봇은 다른 어떤 로봇 분야보다 인간과 가깝게 동작하는 로봇 시스템이고 이에 따라 안전에 대한 문제에 민감합니다. 또한 개발 형태가 착용자 니즈를 철저히 반영되어야 한다고 생각합니다. 로봇이 단독으로 동작하는 형태가 아니기 때문에 착용자가 지속적으로 활용할 수 있는 기술이 바탕이 되는 것이 중요하고, 소프트 또는 강체 형태에 구속되지 않고, 서로의 장점을 부각시키며 착용자의 편의를 극대화 할 수 있는 형태로 발전되어야 할 것입니다.
Q. 인간-로봇 협업 연구에서 가장 큰 애로 기술은 무엇인지 궁금합니다.
위에서도 설명되었듯 인간이 함께 로봇의 제어루프 안에 포함되어 있다는 점이 가장 큰 어려운 점이면서도 매력적인 점이라고 생각합니다. 대부분 로봇이 인간의 안전을 위해서 개발되었고, 규제 또한 발전해왔기 때문에 이를 만족하면서 연구를 진행하는 것이 가장 어려운 점이라고 할 수 있습니다.
반면 인간-로봇 상호작용을 연구하게 되면 필수적으로 인간에 대해서 이해해야 하고, 또 인간을 통한 실험 검증이 필수 요소이기 때문에 항상 모든 결과물은 사용자를 통해서 피드백을 받게 됩니다. 외골격 로봇을 개발할 때도 착용자들에게 의견을 묻고, 피드백을 받았으며, 협동 로봇을 연구할 때도 사용자를 중심으로 검증하는 과정을 거치며 제가 연구 개발한 로봇들을 발전시켜 왔습니다. 이런 과정들은 연구를 진행하고 그 효과를 검증하는 데 매우 까다롭지만, 실생활에서 활용하기위한 관점에서 어느 연구 분야보다 그 목적에 근접한 연구 분야임을 느끼게 해줍니다.
Q. 로봇을 연구하시게 된 동기가 있다면?
고등학교 때 2족 보행 로봇인 아시모(Asimo)가 뉴스에 나오는 모습을 보고 처음 로봇을 개발하고 싶다는 꿈을 가지게 되었습니다. 어릴 적 장난감으로만 생각했던 로봇이 실제로 걷는 모습을 본 후 가슴이 뛰었습니다. 그 당시에는 막연하게 로봇을 공부하고 싶다는 생각을 갖고 기계공학과로 진학을 하게 되었는데, 한양대학교에 로봇을 연구하는 연구실이 있다고 해서 3학년 때 한창수 교수님을 찾아뵙게 되었습니다. 그 때 처음 실험실 내부 모습을 접하였고, 실제 로봇이 동작하고 사용되는 것을 보니 당장 시작하고 싶다고 말씀을 드리고 연구실 생활을 시작하게 되었고, 현재까지도 그 느낌을 간직하고 로봇을 계속 연구하고 있습니다.
Q. 2016년 5월부터 올해 2월까지 이탈리아 IIT에서 약 5년간 박사후 연구원으로 계셨는데 어떤 연구를 주로 하셨는지요?
이탈리아 IIT에서 Principal investigator(PI)인 Arash Ajoudani가 만든 새로운 랩인 Human-robot interfaces and physical interaction (HRI2)의 박사후 연구원으로 처음 시작할 당시 HRI2 랩은 6개월 밖에 되지 않은 신생 연구 그룹이었고, 저를 제외한 포닥 1명이 전부였습니다. 하지만 PI, 그리고 저를 포함한 두 명의 포닥 모두 외골격 로봇 연구 경험이 있어 기존 외골격 로봇이 갖는 한계 그리고 새로운 연구 방향을 찾는 데 많은 공감대가 있었습니다. 그리고 현재, 초반에 저희 모두가 함께 설정한 그룹의 연구 방향인 “Our idea is to make robots physically and intelligently assist humans, not to avoid or replace them!”을 바탕으로 꾸준히 발전 시켜 왔습니다.
| |
 |
|
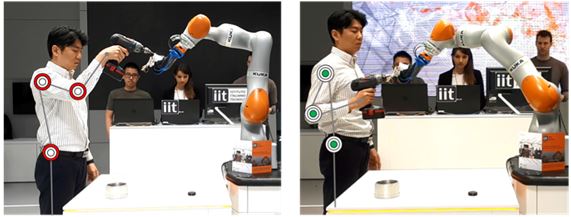
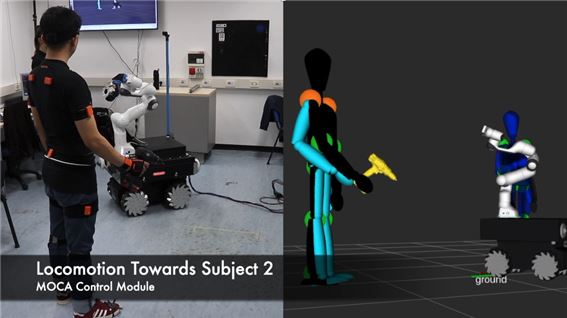
| ▲ 인체공학적 인간-로봇 협업 제어프레임워크 시연 모습 |
여기서 저는 인간공학 기반의 인간-로봇 협업 제어 방법, 즉 로봇이 작업자의 자세, 작업 강도 등을 인체 모델링을 통하여 실시간으로 인지하여 작업자의 위험부담이 가장 적은 최적 자세를 찾아 작업하도록 로봇이 작업물의 위치를 변경하도록 하는 기술을 기반으로 하며, 머신러닝 기법 및 적응형 로봇제어 알고리즘이 적용된 인간-로봇 협업 제어 프레임 워크를 개발하였습니다. 또한 고정형 협동 로봇 뿐만 아니라, 그룹에서 개발한 모바일 머니퓰레이터인 MObile Collaborative robotic Assistant(MOCA)를 통해 확장되어 하나의 로봇이 여러 작업자와 협력함과 동시에 각각 작업자들에 맞춰진 인간공학적 자세를 제공할 수 있는 기술을 개발하였습니다.
| |
 |
|
| ▲ MObile Collaborative robotic Assistant (MOCA) 를 활용하여 여러작업자와 인간공학을 고려한 협업 작업 시연 모습 |
이러한 인간-로봇 협업 기술을 기반으로 가장 최근까지는 공장 환경에서 유연한 작업 공정과 작업자들의 근로 환경을 증진하기 위한 인간-로봇 협동 기술의 개발을 목적으로 하는 Socio-physical Interaction Skills for Cooperative Human-Robot Systems in Agile Production (SOPHIA) 프로젝트를 아라쉬 아조다니(Arash Ajoudani) 교수와 함께 수행하였고, 이에 포함되는 주요 기술은 인체 모델링 기법, 실시간 기반 작업자의 인간공학적 상태 인지 및 예측기술, 인간공학적 분석 기반의 제어 전략, 협동작업에서 인간-로봇 역할 할당 기술, 최적의 협업 로봇 제어 및 플랫폼(모바일 메니퓰레이터, 외골격 로봇 등) 개발 등의 역할을 담당하였습니다.
| |
 |
|
| ▲ IIT 박사후 연구원으로 재직시 KUKA INNOVATION AWARD 2018에서 우승한 후 |
Q. 이탈리아 공학연구소(IIT)는 세계적인 로봇연구소로도 유명한데 로봇연구에 있어서 이탈리아가 지닌 강점이라던가 우리가 배울만한 점은 무엇이 있을까요?
IIT는 2005년에 설립된 이탈리아 정부 산하 연구기관으로, 제가 속한 HRI2부서는 제노바(Genova)의 중앙연구본부에 위치하고 있는데, IIT는 이를 포함해 이탈리아 전국에 11개 그리고 미국 MIT(메사추세츠공대)와 하버드에 2개의 연구소를 보유하고 있습니다. 로보틱스(Robotics), 나노물질 (Nanomaterials), 생활기술(Lifetech), 컴퓨터 과학(Computational Sciences)의 4가지 주요 연구 도메인을 가지고 있으며, 각각의 연구 도메인에는 하부의 주요 연구팀이 구성되어 있으며, 특히 로보틱스 도메인 하에는 18개 연구팀이 활동하고 있습니다. IIT 인원 구성은 현재 60개국, 총1758명 이상의 연구 스태프가 활동하고 있습니다. 이 중 7%가 연구 책임자(Principal investigators), 11%가 스탭 연구원이나 기술자(staff researcher and technologist), 40%가 박사후 연구원, 42%가 박사과정 학생들입니다.
연구소다보니 대학과는 다르게 자체로 보유한 학위 과정이나 수업이 없지만, 모든 학생은 이탈리아 국내에 있는 대학에서 박사학위를 수여 받게 됩니다. 저희 그룹에 속한 박사과정 학생들은 피사대학교(Universita' di Pisa)나 밀라노 공과대학(Politecnico di Milano) 학생들이며, 인원채용 시 IIT와 연계된 대학원에 동시에 지원하여 선발되게 됩니다.
앞에서 말씀드렸듯이, 대부분의 인원 구성이 박사후 연구원으로 구성되어 있어, 박사학위를 받은 후 이곳에서 연구 경험을 쌓고 자신의 최종 진로를 선택하는데 좋은 환경을 가지고 있습니다. 특히 로보틱스 분야의 경우 다국적으로 이루어져 있으며, 대부분 포닥을 마친 후 대학 교수 또는 연구원으로 옮겨가는 경우가 많습니다. 이러한 이유로 IIT 출신 연구자들을 학회에서도 쉽게 찾아볼 수 있다는 점이 장점일 수 있고, 이러한 네트워크를 기반으로 협력 교류도 많아 연구적인 네트워크를 확장하는 데도 많은 도움이 됩니다.
가장 부럽고 꼭 배우고 실천하고 싶은 강점은, 연구 환경이나 분위기가 매우 자유로운 것입니다. 이를 통해서 모든 팀 구성원이 자유롭게 주제를 선정하며 박사후 연구원과 PI는 연구 방향이 잘 흘러갈 수 있도록 지원해 주고 있습니다. 또한 IIT기관에서도 연구에 대한 지원이 매우 적극적이라 시드머니를 통해서 초창기 기반 연구를 지원하고, 이를 통해 대형 유러피언 프로젝트 지원에 적극적입니다. 그 외에도 유럽 내의 다른 연구기관과의 협업과 인턴쉽 지원도 매우 활발하여 다양한 연구기관과의 연계 및 연구 확장에도 매우 도움이 됩니다. 또한, 작은 연구 아이디어가 있더라도 먼저 실행해보고 결과를 도출해 연구 성과를 만들어 낼 수 있는 시스템이 잘 구성되어 있어, 결과적으로는 더 높은 가치를 갖는 연구성과를 도출하는 데 도움이 되는 것 같습니다.
Q. 로봇 연구자로서 앞으로의 꿈과 목표가 있다면?
제가 처음 외골격 로봇을 연구할 때부터 현재 인간공학 기반의 인간-로봇 협업 연구까지 대부분 산업을 기반으로 하는 작업자들에게 도움이 될 수 있는 연구를 하고 있습니다. 앞으로도 이런 적용 분야를 목표로 연구를 진행해 나갈 것입니다. 특히 로봇이 지금도 미래에도 인간의 일자리를 위협하는 존재가 아닌 협업을 위한 파트너로 인식될 수 있도록, 더욱 친숙하고 편하게 사용할 수 있는 협업 로봇을 개발하고 싶습니다.
오랫동안 같이 일한 파트너들끼리는 말로 하지 않고 서로 표정과 눈빛만 봐도 무엇을 원하는지를 안다고 하는 말이 있습니다, 제 목표는 이러한 로봇 파트너를 개발하여 로봇을 활용한 산업 분야가 유연하게 변화하며 발전할 수 있도록 기여하는 것입니다. 이를 위해서 로봇이 인간의 의도를 이해할 수 있는 지능적 요소나 로봇의 물리적-감성적인 유연함이 이 기술의 핵심이 되리라 생각되며, 이러한 기술을 개발하기 위해 더욱 열심히 연구하려고 합니다.
Q. 최근 로봇에 대한 관심이 늘어나면서 이를 연구하려는 학생이 늘어나고 있습니다. 선배로서 후배에게 어떤 준비와 노력이 필요한지 조언해 주신다면?
로봇을 연구하는 분들은 앞으로 점점 늘어날 것이고, 무궁무진한 가능성이 있는 분야입니다. 이러한 가능성은 기존의 학문과 다르게 기계공학, 재료공학, 전자공학 등 기초 공학 분야를 기반으로 할 뿐만 아니라, 의공학, 인문학 등 다양한 학문이 융합될 수 있는 가능성을 가진 분야이기 때문이라고 생각됩니다. 로봇공학이라는 학문을 하고 싶어 하고, 시작하려는 분들께서는 다른 학문을 받아들이는데 두려워하지 않길 바랍니다. 또한 여러분야의 전문가들과 협업을 많이 시도해 보시길 바랍니다. 융합을 통해서 기존에 생각하지 못했던 새로운 아이디어를 얻을수도 있고 연구 내용을 더욱 확대할 수 있을 것입니다.
많은 연구자가 다양한 방법으로 연구 내용을 찾아보고 있습니다. 특히 소셜미디어, 유튜브 등을 통해서도 연구 내용이 많이 공유되고 있는 시대이다 보니, 연구 개발된 내용이 있다면 여러 경로로, 적극적으로 연구 성과를 공유하는 것이 좋다고 생각합니다.
| |
 |
|
| ▲ MOCA와 HRI 인터페이스를 결합하여 외골격 로봇처럼 활용하는 모습 |
Q. 연구자로서 한국 로봇산업이 한 단계 더 발전하기 위해 조언을 해 주신다면...
국내 그리고 해외에서 오랫동안 로봇연구를 해오면서 느낀 점은, 국내 로봇기술은 전세계 어느 곳에 내놓아도 전혀 뒤처지지 않는 상당히 발전된 기술을 보유하고 있다는 점입니다. 반면 이에 대한 기술의 확장과 지원, 그리고 자신감이 매우 결여되어 있습니다. 이는 로봇 개발에 대한 투자와 지원이 성공위주로 이루어지고, 유행에 따라 이루어지기 때문이라고 생각합니다. 로봇기술은 다양한 학문을 융합하고, 사용자에게 더욱 가깝게 다가가기 위해서는 많은 시행착오를 거쳐야 기술이 제고될 수 있습니다. 조금 더 로봇 연구개발을 위한 분야와 기회를 넓히고 무분별한 성능위주, 실적위주의 평가가 아닌 실용성, 활용성을 토대로 지속적인 지원이 이루어졌으면 합니다.
Q. 연구에 주로 영향을 받은 교수님이나 연구자가 계시다면...
외골격 로봇 연구, 그리고 인간-로봇 상호작용력 기반 제어를 연구하는 분들께서는 호마윤 카제루니(Homayoon Kazerooni) 교수님(UC버클리) 논문을 한 번이라도 안 읽어 본 적은 없을 것이라고 생각됩니다. 특히 외골격 로봇에 관한 논문 중 “Biomechanical design of the Berkeley lower extremity exoskeleton(BLEEX)”와 “On the control of the berkeley lower extremity exoskeleton(BLEEX)”는 설계와 제어의 내용을 자세하게 포함하고 있어, 초기 외골격 로봇의 연구를 할 때 정석처럼 읽어보았습니다. 또한 학회에서 직접 이야기해 볼 기회가 있었는데, 외골격 로봇에 대한 열정이 매우 높으셨고, 제가 가지고 있던 외골격 로봇 개발의 어려움을 고민해 주셨고, 특히 그때 상호작용력을 이용한 제어 방법에 관해서 전기 모터를 이용한 외골격 제어에 대한 경험담과 조언을 해 주셨었습니다. ▒ |