|
서울대 융합 연구팀이 물건을 단단히 쥐고자 하는 의도를 하나의 센서만으로 파악해 효과적으로 도와주는 장갑을 개발했다고 7일 밝혔다.
이번 연구는 서울대학교 체육교육과(안주은 교수)를 비롯해 서울대학교 기계공학부(조규진 교수), 카이스트 전산학부(조성호 교수), 분당서울대학교병원(공현식 교수)의 융합연구로 이뤄졌다. 서울대학교 천상희 연구원이 주저자로 작성한 관련 논문은 'IEEE Transactions on Medical Robotics and Bionics' 2월호에 정식 게재될 예정이다.
이번에 개발한 장갑은 힘을 주고자 할 때 근육을 중심으로 발생하는 전기적인 신호인 근전도를 감지해 동작의 의도를 파악하는 게 핵심이다. 그동안 근전도를 이용한 의도 파악은 의족이나 의수를 제어하는데 주로 사용돼 왔다.
그러나 장갑과 같은 착용형 로봇에 적용하는 데에는 많은 어려움이 따랐다. 정확한 의도 파악을 위해선 여러 개의 근전도 센서를 여러 근육에 부착시켜 사용해야 하는데 근육의 위치는 사람마다 다르고 센서가 조금이라도 원래의 위치에서 벗어나면 의도 파악이 부정확해졌다. 또한 팔을 펴거나 굽히는 자세의 변화로 인해 의도 파악 성능이 저하되기도 했다.
| |
 |
|
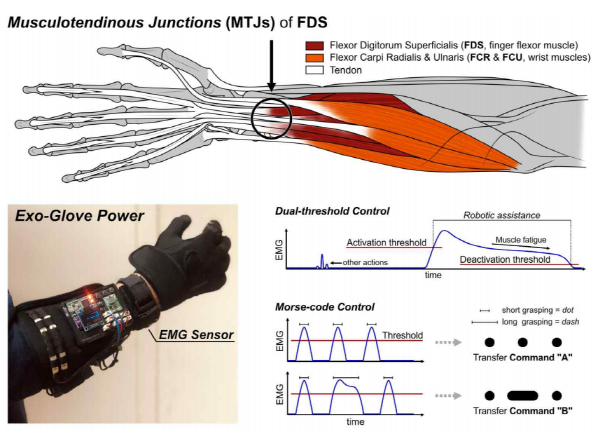
| ▲ 이번 연구는 기존 연구와 달리 근육 중심부가 아닌 천지굴곡근(Flexor digitorumsuperficialis, FDS)의 힘줄-근육 접합부(Musculotendinous Junction)에서 나오는 근전도 신호를 사용했다.(사진=서울대학교) |
연구팀은 큰 악력을 내고자 할 때만 손목 부근에서 큰 근전도 신호가 감지되는 현상을 발견, 이를 이용해 장갑형 로봇을 직관적으로 제어하는 방법을 개발했다. 그 결과 여러 개의 센서에 의존하는 기존의 방식과 달리, 하나의 센서를 손목 부분에 밀착시키는 것만으로 큰 악력을 내고자 하는 의도를 정확히 파악할 수 있었다. 성능 역시 팔의 각도 등 자세 변화에 무관하게 높게 유지됐다. 장갑의 의도 파악은 5개의 센서를 팔뚝 주위에 있는 여러 근육에 부착시켜 의도를 파악하는 기존의 방법보다 성능이 우수했다는 설명이다.
이번 연구 성과는 인체와 관련된 새로운 발견과 운동학적 실험, 기계학습, 소프트 로봇제작 등 여러 분야에 걸친 전문성의 융합을 통한 기술 개발 사례라는 점에서 의미가 있다. 특히 단일 센서만으로 정확한 의도 파악과 악력 증강이 가능해 신체 능력 증강을 위한 실용적인 착용형 로봇 개발에 중요한 기여를 할 것으로 기대된다. |
















