|
코로나19의 기세가 잦아들지 않고 최근 더욱 확산되고 있다. 이런 상황에서 로봇을 활용한 코로나19 방역이 눈에 띈다. 특히 감염 가능성을 최대한 줄일 수 있도록 사람 대신 로봇이 투입돼 현장에서 활약하고 있다. 방역에 투입되는 로봇의 종류 또한 다양한데, 이중 최근 협동로봇이 효과적인 방법으로 떠오르고 있다. 글로벌 협동로봇 기업 유니버설 로봇(Universal Robots)은 세계 곳곳에서 코로나 19에 대응하기 위해 개발, 활약중인 자사의 협동로봇을 소개했다. 어떤 로봇이 활약중인지 살펴보자.
▲ 협동로봇을 활용한 방역 자동화
| |
 |
|
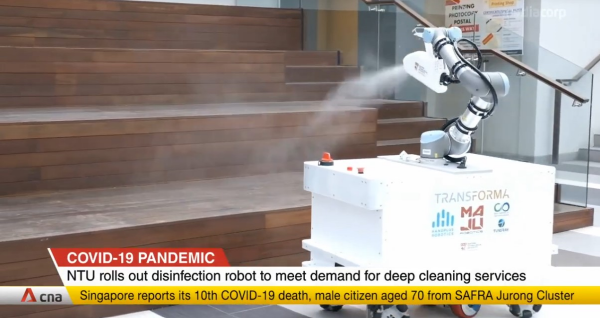
| ▲ 싱가포르 방송사에 방영된 XD봇, 자동으로 이동하며 소독제를 분사하는 모습 |
잠재적 감염 지역에서는 사람의 직접적인 접촉 없이 효과적인 정밀 세척과 소독 기술에 대한 수요가 크게 늘고 있다. 싱가포르 난양이공대 연구진은 'XD봇(XDBOT:eXtremeDisinfection roBOT)‘이라는 자동화 방역 로봇을 공개했다. 이 로봇은 글로벌 협동로봇 브랜드인 유니버설 로봇의 UR5를 이동형 플랫폼에 설치하고, 소독제 분사를 위한 정전기 스프레이 노즐을 장착했다. UR5 협동로봇은 어떤 이동형 플랫폼에도 설치가 가능해 장소에 구애 받지 않고 로봇을 통한 방역 작업이 가능하다.
XD봇은 사람의 손동작을 모방해 침대 밑, 탁자 아래 등 손 닿기 어려워 보이는 공간도 작업할 수 있도록 프로그래밍됐다. 방역 담당자가 태블릿PC나 노트북을 이용해 로봇을 원격 제어할 수 있기 때문에 사람의 접근을 최소화 할 수 있어 감염 위험성도 줄인다. 난양이공대 측은 이미 캠퍼스 내 공공장소에서 시험주행을 성공적으로 마쳤으며, 인근 지역 내 공공 병원에서 사용할 준비를 하고 있다고 밝혔다.
| |
 |
|
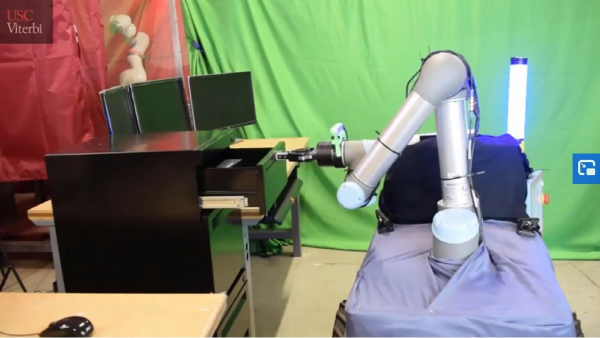
| ▲ 구석구석 방역하기 위해 아담스-UV에 설치된 UR5가 서랍을 열고 있다 |
미국 서던캘리포니아대 연구팀은 아담스(ADAMMS-UV:Agile Dexterous Autonomous Mobile Manipulation System-UV)라는 방역 로봇을 공개했다.
아담스-UV는 유니버설 로봇의 UR5가 이동 플랫폼에 설치되어 있다는 점에서는 XD봇과 동일하지만, 소독제를 살포하는 대신 UV 광원과 광선 스틱을 활용한다는 점이 다르다. UV 광선은 바이러스의 DNA 구조를 분해하며, 아담스는 이를 통해 방역한다. 이 로봇은 서랍을 열거나, 선반 위를 정리하는 등 인간의 손과 같은 동작을 UR5에 장착된 로봇 그리퍼를 통해 수행하며, 이를 통해 꼼꼼하게 방역 작업을 한다. 또한 카메라가 장착 돼 있어 주변을 감지하고 소독할 장소를 3D 모델로 만들어 효과적으로 방역을 진행한다. 원격 제어도 가능해 잠재적 감염위협을 줄일 수 있다. 현재 연구팀은 공공장소에서의 사용을 위한 시험과 승인 절차를 진행 중이다.
▲ 협동로봇으로 코로나19 진단
| |
 |
|
| ▲ 협동로봇이 코로나19 검사를 하고 있다. |
협동로봇으로 코로나19를 자동 진단하는 로봇도 개발됐다.
덴마크의 로봇기업 라이프라인 로보틱스(Lifeline Robotics)는 덴마크남부대 로봇 연구진과 함께 코로나19 검사 로봇을 개발했다. 이 로봇은 유니버설 로봇의 UR3에, 3D 프린터로 자체 제작된 엔드이펙터(협동로봇 팔 끝에 다는 도구)를 사용한다. 진단 과정은 빠르고 정확하게 이뤄지며 모두 협동로봇에 의해 자동으로 진행된다.
로봇은 우선 환자의 신분증을 스캔함과 동시에 신분증 라벨이 인쇄된 통과 샘플 키트와 면봉을 준비한다. 이후 협동로봇은 눈과 같은 역할을 하는 비전 시스템을 사용하여 환자의 목구멍에서 검체를 채취할 부분을 정확하게 확인한다. 채취 과정이 끝나면, 로봇은 채취 샘플을 통에 넣고, 뚜껑을 닫는 과정까지 수행한다. 전체 과정을 진행하는데 약 7분 정도 소요되고 검체 채취는 단 25초만에 끝난다. 이 로봇 시스템은 이미 지난 5월에 덴마크에 공식 출시되었다.
이밖에도 협동로봇의 본 무대인 제조분야에서도 코로나19 대응을 지원하고 있다. 코로나19로 인해 특정 물품에 대한 전례 없는 수요 증가로 생산 유연성이 부족한 제조업체들은 대응하기 어려운 상황이다. 협동로봇은 설치가 쉽고 프로그래밍이 간편해 빠른 자동화 구축을 지원하며, 실제로 세계 곳곳에서 그 가치가 드러나고 있다. 예를 들어, 스페인의 자동차 제조업체는 기존의 자동화 공정 수행 조립 라인 중 하나를 환기장치 생산으로 변경했다. 이 업체는 품질 검사를 수행하는 최종 생산 라인에 협동로봇을 설치했다. 중환자실에 인공호흡기를 긴급 공급하기 위해 총 3주간 생산 라인을 가동하였으며, 하루 300대의 물량을 소화했다.
또한 스페인의 한 자동차 제조업체는 기존의 자동화 공정 수행 조립 라인 중 하나를 환기장치 생산으로 변경했다. 중환자실에 환기장치를 공급해야 했던 이 회사는 3주간 생산 라인을 특별 가동했다. 이 업체는 품질 검사를 수행하는 최종 생산 라인에 협동로봇을 설치했다.
스페인의 또 다른 플라스틱 제조업체는 수요가 많아진 병원 침대 부품 생산으로 공정을 전환했다. 빠른 재배치가 가능한 협동로봇의 이점을 활용하여 병원 침대에 사용되는 플라스틱 부품 생산으로의 전환에 성공했다. |
















