|
| |
 |
|
| ▲ HRI 2017 행사가 열린 오스트리아 비엔나 올라 더 비센샤프트 사이언스 홀 모습 |
2019년도 '제14회 인간-로봇상호작용 국제컨퍼런스(HRI 2019)' 한국 대구 유치가 확정되었다.
지난 6일부터 4일간 오스트리아 비엔나에서 개최된 ‘2017년 제12회 인간-로봇상호작용 국제컨퍼런스’에 대구시가 합동유치단(대표 : 한국과학기술원 김정 교수 및 대구컨벤션관광뷰로)을 파견하여, 2019년도 '제14회 인간-로봇상호작용 국제컨퍼런스’를 대구로 유치하는데 성공하였다고 10일 밝혔다.
올해로 12회째 개최되고 있는 인간-로봇상호작용 국제컨퍼런스(ACM/IEEE International Conference on Human Robot Interaction)는 미국컴퓨터학회(ACM), 국제전기전자기술자협회(IEEE)가 주관하고 구글, 디즈니 리서치랩, MIT 출판, ABB, 혼다, 토요타랩 등이 후원하는 국제컨퍼런스로 매년 개최된다. 이 회의에는 500명 이상의 인간-로봇 협업, 아동-로봇상호작용 관련 저명한 공학자들이 모여 그 동안의 연구 성과를 공유한다. 이번 컨퍼런스 유치로 2019년 3월 전 세계 500여명의 로봇 공학자들이 대구를 방문하게 된다.
| |
 |
|
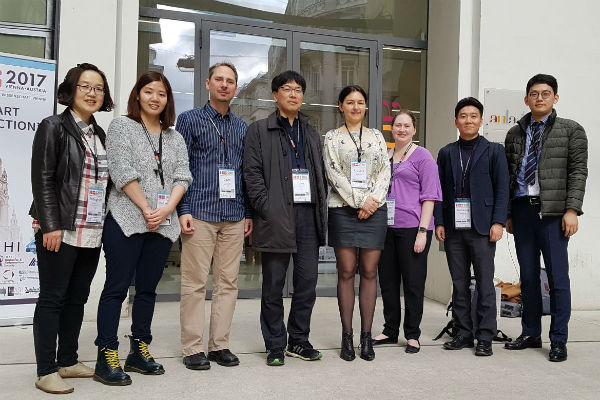
| ▲ HRI 2019 한국유치단 참가자들. 사진 왼쪽부터 청주교대 한정혜 교수(국제 HRI 운영위원), MIT 박혜원 연구원, 스탠포드대학 데이빗 설킨(HRI 2019 프로그램위원장), KAIST 김정 교수(HRI 2019 공동운영위원장), ENSTA - Paris Tech 아드리아나 타퍼스 교수(HRI 2019 공동운영위원장), 네브라스카대 브릿트니 던컨 교수, 서울대 박재흥 교수(HRI 2019 운영위원), 대구컨벤션뷰로 성웅기 주임 |
이번 행사 유치를 위하여 '2019년 인간-로봇상호작용 국제컨퍼런스(HRI 2019)' 공동의장인 한국과학기술원(KAIST) 김정 교수와 프랑스 국립첨단기술고등대학(ENSTA)-파리 테크(Paris Tech) 아드리아나 타퍼스 교수, 대구컨벤션관광뷰로, 한국관광공사 등으로 구성된 한국 합동 유치단은 오스트리아 비엔나 현지에서 4일간의 총회 기간 동안 각 국 대표 등을 대상으로 적극적인 유치활동을 펼쳐 국제HRI 운영위원회 회의에서 대구가 선정되었다.
이번 국제컨퍼런스의 한국유치에는 그동안 세계무대에서 한국이 보여준 저명한 학술적인 기반과 유치단의 김정 교수, 이화여대 곽소나 교수, DGIST 안진웅 교수, 경북대 박순용 교수, 서울대 박재흥 교수 등의 활발한 네트워크가 빛을 발했으며, 무엇보다 대구시와 대구컨벤션관광뷰로, 한국관광공사로 구성된 유치단과 한국로봇학회(회장 조영조)의 적극적인 지원 속에 여러 조직이 조화를 이루며 이뤄낸 결과이다.
| |
 |
|
| ▲ HRI 행사장 모습 |
특히 인간-로봇상호작용 국제컨퍼런스는 “파이오니어 프로그램”을 통해 세계의 우수한 대학(원)생, 젊은 연구원을 육성도 지원하여 미래 연구인력 양성에도 관심을 두고 있다. 인간-로봇상호작용이란, “인간과 로봇 사이의 상호작용(human-robot interaction)을 통하여 사회행동학, 로봇학, 컴퓨터과학, 기계공학, 디자인 등 다양한 융합적 연구를 말하며, 주로 교육/오락, 의료, 문화, 홈서비스 등의 소셜 로봇 분야에 적용될 수 있다.
대구시 김연창 경제부시장은 “인간과 로봇간의 가교 역할을 하는 로봇의 S/W, H/W 등 로봇관련 융복합 산업의 세계적 규모 국제컨퍼런스를 유치함으로써 로봇도시 대구의 인지도 제고에 긍정적인 평가를 얻었다"며, "지역경제 활성화에 기여하고 참가자와 주최자 모두가 만족하는 역대 가장 성공적인 국제컨퍼런스를 치룰 수 있도록 관계 기관과 긴밀히 협조하여 적극적인 지원을 할 계획이다”라고 밝혔다. |
















