|
로봇신문은 IROS2016 행사기간 플래너리 토크를 비롯해 일부 세션에 대해서는 현장에서 취재한 본지 객원기자들의 도움을 받아 자세한 내용을 소개하고 있습니다. 본 기사는 12일에 열린 아이 밍 첸(I-Ming Chen) 싱가포르 난양공대 교수의 "Human-Robot-Environment Interaction For Advanced Manufacturing Skill Learning and Automation" 이라는 주제의 키노트 스피치를 소개합니다. 이 내용은 KAIST 김종환 교수 연구실 이원형(박사과정) 연구원이 보내 온 내용입니다.
첸 교수는 사람이 수행하던 정교하고 복잡한 제조 작업을 로봇이 학습하고 자동화하기 위해 ‘인간-로봇-환경 상호작용(Human-Robot-Environment Interaction)’의 관점을 도입하였고, 이를 적용한 산업용 로봇의 예시를 보여주었다.
전자장비 조립 같은 제조 작업은 정교한 움직임 조작과 물체와의 적절한 힘조절이 필요하다. 사람은 이러한 매우 정교한 제조 작업을 위해서 시각, 촉각, 청각 등 다양한 채널의 피드백을 사용하여 실시간으로 작업을 수행하는데, 이러한 사람의 인지 능력은 로봇의 인지능력보다 뛰어나다. 반면, 로봇은 사람보다 더 정교하고 강하며 지속적인 작업 수행이 가능하다. 따라서, 사람의 환경 이해, 작업 계획 등의 지식을 로봇이 재사용할 수 있도록 하여 전반적인 효율 향상을 도모할 수 있다고 주장했다.
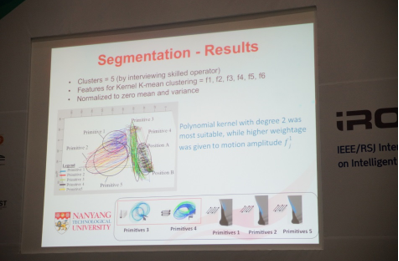
로봇이 사람의 작업을 학습하기 위한 과정을 총 7개의 과정으로 나누어 설명하였고 각 과정은 다음과 같다. (1) 사람의 작업 캡쳐, (2) 시각화 및 작업 궤적 분할, (3) 특징 추출, (4) 얻어진 정보로부터 로봇 및 로봇이 사용할 도구의 움직임 경로와 방향 생성, (5) 로봇 플랫폼에 맞도록 시뮬레이션, (6) 후처리, (7) 작업 수행 및 검증. (1)부터 (3)의 과정은 사람이 환경을 어떻게 이해하는지의 정보를 얻어내는 과정으로 인간-환경 상호작용에 해당하고, (4)부터 (6)의 과정은 사람의 시연을 로봇에 맞도록 적용하는 단계로 인간-로봇 상호작용의 관점으로 접근할 수 있음을 보였다.
구체적인 기술 설명을 위해 표면 마무리 작업(Linishing)을 예시로 들었다. 표면 마무리 작업은 그라인더 등의 도구를 통해 표면을 원하는 모양으로 만드는 작업이다. 사람의 작업 시연을 분석하여 학습한 로봇은 30%의 시간을 단축했음을 결과로 보였다. 예시와 함께 설명된 7가지 작업 과정에 대한 기술 설명은 아래 발표 슬라이드를 참고하면 된다.
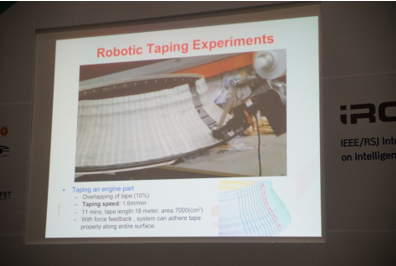
표면 마무리 작업 이외에 표면 테이핑/마스킹 작업 결과도 예시로 보였다.
첸 교수는 인간-로봇-환경 상호작용 강연을 통해 △인간-로봇-환경 상호작용 접근법으로 복잡한 작업환경의 작업을 로봇 자동화에 적용할 수 있다. △적용 예시로 표면 마무리, 표면 테이핑 작업을 보였다. △학습하기 위해 얻어지고 정량화된 인간의 작업 과정을 “Digitized skill”이라고 부르고자 한다는 결론을 보여주었다.
|