|
| |
 |
|
| 김호영 교수와 조규진 교수가 소금쟁이 로봇의 작동을 살펴보고 있다. |
서울대학교 기계항공공학부 김호영, 조규진 교수 연구팀은 소금쟁이가 수면에서 도약할 때 표면장력을 최대한 이용하는 방식을 응용해 소금쟁이와 유사한 수상 도약 로봇을 개발했다.
물가나 습지에 서식하는 다양한 소형 생물들은 주로 물의 표면장력을 이용하여 활동한다. 이들의 수상 거동은 다양한 방식으로 연구되고 응용되어 왔다. 특히 긴 다리를 자유자재로 움직여 수면에서 활주하고, 도약하는 소금쟁이의 거동은 정교함과 성능면에서 독보적이다. 이러한 소금쟁이의 수상 활주에 관하여 많은 연구가 이루어지고 응용되어 왔지만 수상 도약에 대한 연구는 기초적인 단계에 머물렀었다.
이번 연구결과에 따르면, 땅에서 뛰는 많은 동물들과 달리, 소금쟁이는 도약할 때에 수면을 단순히 아래로 누르지 않고 넓게 벌렸던 네 개의 다리를 회전시켜 가운데로 모으는 동작을 취한다. 이는 다리가 수면을 누르는 시간을 최대화하여 가속 시간을 늘릴 수 있는 이점이 있다. 소금쟁이는 또한 수면을 누르는 동안에 표면 장력이 버틸 수 있는 한계 이하로 힘 조절을 한다. 이를 통해 운동 중에 수면이 뚫려 다리가 물에 빠지는 위험을 줄이고 가속을 최대화하여 매우 효율적으로 도약한다.
서울대 연구팀은 소금쟁이의 도약 특성 연구 결과를 바탕으로 표면장력을 활용한 효율적인 수상 도약을 구현할 수 있는 로봇을 개발하는 성과를 거뒀다. 벼룩의 도약기관 구조를 모사한 토크 역전 메커니즘(torque reversal catapult mechanism)을 활용하여 소금쟁이의 다리 회전 및 추력 곡선을 모사하였고, 최대 추력이 표면 장력 허용 한계 이하가 되도록 액추에이터를 설계하였다. 또한, 입체 종이책을 만들 듯이 팝업(pop-up) 공정으로 제작한 초경량 액추에이터에 가늘고 긴 형상합금 다리를 이어, 68 mg의 초경량 로봇을 구현하였다. 본 로봇은 수면을 뚫지 않고 표면장력을 최대로 이용하며, 지상에서 뛰는 높이만큼 물에서도 뛰어오를 수 있다.
연구팀은 이 연구가 생물학자, 유체역학자, 로봇공학자의 노력이 합쳐져서 이루어진 융합연구의 대표적 성공 사례라고 밝혔다. 곤충 크기에서 단순한 기능을 수행하는 생체모방 로봇은 휴머노이드와 같은 고비용 로봇과는 차별되는 분야에서 이용될 수 있어서 세계적으로도 큰 관심을 받고 있다. 가까운 미래에 소형 로봇은 재해나 오염지역, 전장에서 대량으로 흩어져 감시, 정찰, 인명 발견 등의 목적에 사용될 것으로 연구팀은 전망했다.
이번 연구에는 서울대 생명과학부 피오트르 야브원스키 교수, 하버드대 로버트 J. 우드(Robert J. Wood) 교수도 참여했다. 이번 연구 결과는 ‘사이언스’ 7월 31일자 온라인판에 게재되었다(논문명: Jumping on water: Surface tension-dominated jumping of water striders and robotic insects). 이번 연구는 2014년도 정부(미래창조과학부)의 재원으로 한국연구재단의 지원과 방위사업청의 재원으로 국방생체모방 자율로봇 특화연구센터의 지원을 받아 수행됐다.
<관련 연구 사진>
| |
 |
|
| <그림1>소금쟁이의 수상 도약. (A) 소금쟁이의 수상 도약의 연속 사진. (B) 가속하는 동안, 소금쟁이의 다리 회전으로 인하여 접수 부위가 수면을 누른 상태에서 수평으로 미끄러지는 모습. (C) 소금쟁이 다리에 작용하는 단위길이당 수직힘. (D) 소금쟁이와 로봇의 속도 변화. (E) 수면을 내리 누르는 소금쟁이 다리 끝의 속도 변화. (C-E) 검정 기호는 네 마리의 소금쟁이, 붉은 기호는 로봇의 측정값. |
| |
 |
|
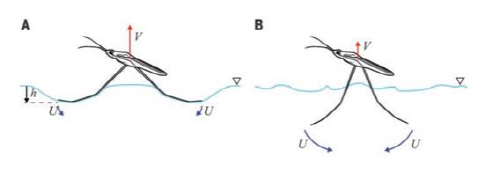
| <그림2> 수상 거동 시 수면이 (A) 뚫리지 않는 경우와 (B) 뚫리는 경우의 비교. 단위 길이당 힘이 표면 장력의 한계를 넘으면, 다리가 물에 빠지면서 표면장력이 급격히 감소하고, 물의 저항과 교란에 따른 에너지 손실이 증가. |
| |
 |
|
| <그림3> 벼룩을 모사한 토크 역전 메커니즘. (A-C) 메커니즘의 동작 원리. (A) 초기 상태에서, L자형 탄성체에 부착된 액추에이터(코일)가 수축하는 힘에 의하여 구조체를 윗 방향으로 회전시키는 토크가 발생되나, 구조체 가운데의 지지대가 회전을 막고 있다. (B) 액추에이터가 가열되어 수축하면 L자형 탄성체가 아래로 휘면서 액추에이터가 구조체의 회전 관절 아래로 이동한다. (C) 액추에이터가 수축하면서 구조체의 회전관절 아래에 놓이게 되면 토크의 방향이 역전되면서 구조체를 아랫방향으로 회전시키는 토크가 발생하며, 이로 인하여 구조체가 빠르게 회전한다. (D) 수상 도약 로봇과 소금쟁이. 로봇의 다리는 초소수성 물질로 코팅되어 있다. (E-F) 압축 스프링(E)과 토크 역전 메커니즘(F)의 비교. (G) 압축 스프링과 토크 역전 메커니즘의 추력 및 속도 곡선 비교. 액추에이터의 스트로크가 5.75 mm로 동일할 때, 토크 역전 메커니즘이 동일한 속도 1.6 m/s를 얻는 데에 더 적은 힘을 필요로 한다. |
| |
 |
|
| <그림4>로봇의 수상 및 지상 도약 연속 사진. (A) 로봇의 다리가 수면을 변형시키며 가속될 때에 물이 거의 교란되지 않는다. (B) 수면에서 도약하는 로봇의 다리가 수면과 접촉하는 동안 수면을 뚫지 않고 계면을 유지한다. (C-D) 수상 및 지상에서의 로봇의 도약 비교. (E) 다섯 가지 모델 로봇의 수상 도약 측정 결과. 표면 장력 한계 내에서 구동한 로봇 #4만이 지상 도약에 준하는 높은 도약 성능을 보였다. |
|


















