|
| |
 |
|
| ▲ 자율주행 로봇 트랙터 |
히타치조선과 히타치제작소, 얀마는 14일 자율주행 로봇트랙터를 사용하여 벼의 입모(立毛)시기에 골간을 이용한 주행(条間走行 - 심은 벼와 벼 사이를 타이어가 통과하는 주행)과 농작업에 성공했다고 발표 했다.
총무성이 실시하는 '해외 준천정 위성시스템(QZSS)의 고도 측위신호 이용과 관련된 전파 유효 이용에 관한 조사' 위탁을 받아 위성 시스템에서 전달되는 신호를, 호주의 정밀 농업에 활용하는 조사를 실시했다. 구체적으로는 자율주행 로봇트랙터를 제어하고, 실제 농작업에 사용하는 실증 실험을 실시했다.
기존의 GPS 위성으로부터 측위 데이터를 직접 수신하는 정밀 단독 측위방식(PPP 방식)의 위치 정확도는 약 10 ~ 20cm가 한계였다. 실험에서는 호주의 전자 기준점을 사용하여 새로운 정밀 단독 측위방식 (PPP-AR 방식)을 적용하여 측위 정확도를 높이고, 오차 5cm의 정밀도로 농작업을 하는 것을 목표로 해 이번에 성공했다.
히타치조선은 전체 프로젝트 관리, 얀마는 자율주행 트랙터 개발운용, 히타치제작소는 트랙터의 주행 데이터 및 작물 생육 센서 데이터를 수집하고 가시화하는 등의 역할을 수행했다. 또한, 얀마는 2013년 7월에 1대의 트랙터에 사람이 탑승하고, 또 하나의 트랙터는 자동 운전으로 추종 주행시켜, 밭을 갈거나 파종하는 다양한 작업을 할 수 있는 시스템을 탑재한 차세대 트랙터의 컨셉 모델 'YT01'을 발표하였으며, YT01은 2017년 양산될 예정이다.향후 본 조사 실시기관을 중심으로 한 컨소시엄을 형성해, 정밀농업 사업을 적극적으로 전개 해 나갈 예정이며, 또한 위치정보의 고정밀화 기술을 다른 사업에도 응용하고, 호주 이외에 일본과 아시아의 전개도 검토하고 있다.
| |
 |
|
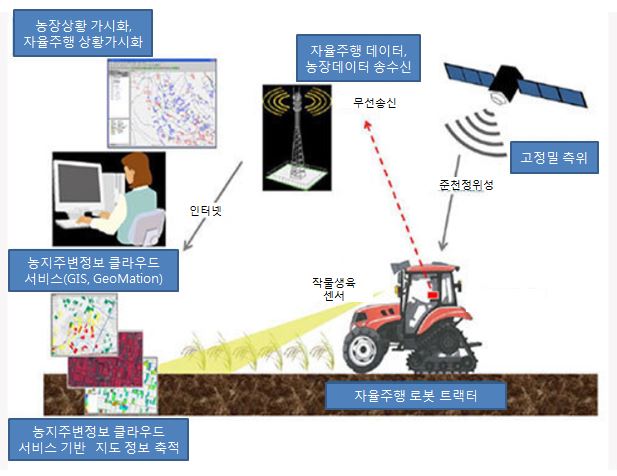
| ▲ 실증실험 개요(자료:히타치제작소) |
|
















