| |
 |
|
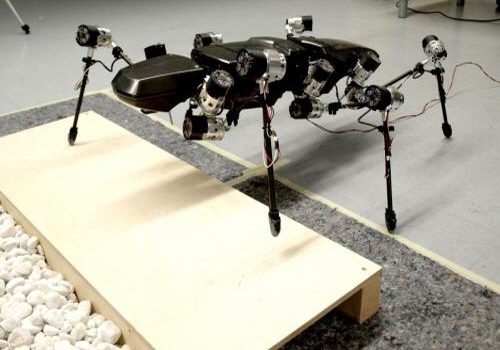
| ▲ 대벌레 행동양식을 그대로 모방해서 독일의 한 대학이 개발한 대벌레로봇 ‘헥토르’. |
독일 빌레펠트대학(Bielefeld University : 독일 노르트라인베스트팔렌 주 빌레펠트에 있는 공립 종합대학) 로봇공학 연구진은 대벌레(stick insect) 행동을 모방하여 작동하는 대벌레로봇을 개발했다고 17일 과학전문 인터넷사이트 피즈(phys.org)가 보도했다.
보도에 따르면 ‘헥토르(Hector)’라고 명명된 이 대벌레로봇은 초경량 외골격에다 매우 탄력적인 관절을 가지고 멋진 걸음자세를 뽐내는 로봇이다.
헥토르의 더욱 특이한 점은 장착된 센서 수가 많다는 점이며, 비집중반응제어개념(decentralized reactive control concept)에 입각해서 기능한다는 것이다.
이 같은 방식을 통해서 헥토르는 오는 2017년에는 살아있는 대벌레의 움직임을 그대로 모방하여 작동되는 매우 정교한 로봇이 될 것으로 기대되고 있다.
대벌레로봇에 대한 기능 향상은 빌레펠트대학 부설 고등상호작용인지기술연구소(CITEC : Center of Excellence Cognitive Interaction Technology)에서 주도적으로 진행되고 있다.
대벌레로봇은 이 연구소 생체모방(biomimetics)과 생체공학(Biomechatronics) 연구그룹에 의해 개발됐으며, 어느 정도 기능 개선이 이뤄지면 생물학자와 로봇공학자들에게 매우 유용한 플랫폼으로 활용될 전망이다.
특히 동물운동학(animal locomotion)에 관한 여러 가설들을 이 플랫폼을 통하여 기각 또는 채택하는 테스트가 이뤄질 것으로 보여 진다.
대벌레로봇에 유달리 많은 센서가 장착된 것은 이들 센서로부터 수집된 다량의 데이터를 융합하여 로봇이 복잡한 환경 속에서 보다 자율적으로 주행할 수 있도록 하기 위해서다.
현재 연구그룹들이 연구에 주안점을 두고 있는 핵심과제는 대벌레로봇이 재질이 서로 다른 거친 다양한 지형에서 어떻게 보행자세와 속도를 유지하면서 유연하게 동작을 최적 조정(optimal coordination of movements)할 수 있느냐 하는 것이다.
이를 위해서 헥토르는 18개나 되는 유연성이 뛰어난 관절작동드라이브(joint drive)를 장착하고 있어 자신이 걷고 있는 지표면의 성질에 따라 걸음자세를 매순간 변화시켜 나갈 수 있다.
이는 곤충들의 생체시스템에서 보행 시 근육이 작동되는 방식을 알고리즘을 통해 그대로 헥토르에게 이식시킬 수 있어서 가능하다고 연구진은 설명했다. |
















