| |
 |
|
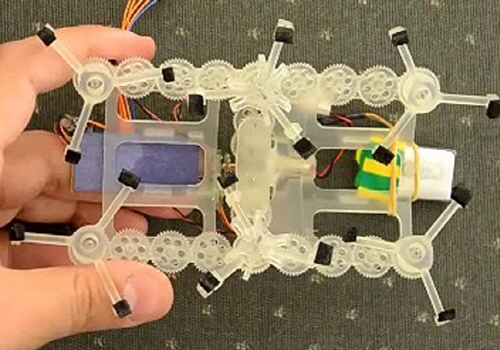
| ▲ 모터 하나로 6개의 다리를 제어하면서 전진, 회전을 능수능란하게 하는 로봇이 등장했다. |
다리처럼 생긴 6개의 바퀴를 가진 조그마한 로봇이 마룻바닥 위를 이리저리 바쁘게 다닌다.
이 로봇은 한 개의 액츄에이터로 자율 주행하는 로봇(1 actuator STeerAble Robot)이다. 그래서 이름이 ‘1STAR’이다.
22일 IEEE.스펙트럼에 따르면 1STAR는 6족 자율 주행 로봇이지만 모터는 단 하나다. 직진과 좌회전, 우회전을 능수능란하게 할 수 있다.
문제는 어떻게 한 개의 모터로 이처럼 다양한 주행 방식을 구현해 내는가 하는 점이다. 이것은 남의 눈을 속이는 속임수가 아니라 매우 영특한 로봇공학과 아주 탄력성이 높은 재료가 어우러져 만들어진 명물이다.
로봇공학의 핵심은 2가지이다. 하나는 ‘3쌍, 즉 6개의 다리 가운데 중앙에 있는 한 쌍이 스프링처럼 탄력적이다. 이에 반해 앞, 뒤에 있는 두 쌍의 다리는 아주 뻣뻣하다’는 점이다.
다른 하나는 ‘한 개의 모터가 가속도를 미세하게 조정할 수 있다’는 점이다.
6개의 로봇 다리 가운데 3개의 다리만 바닥에 접촉한다. 만약 우회전 할 때는 앞, 뒤 나란히 두 다리와 맞은 편 가운데 한 다리가 바닥에 접촉하는 것이다. 이 때 가운데 다리는 스프링처럼 탄력이 있다.
반대로 좌회전 할 때는 우회전 시 사용한 다리의 맞은 편 다리가 바닥에 접촉한다.
이런 식으로 6개의 다리가 3개씩 교대로 움직이면서 하나의 모터를 통해 동력을 전달하면 직진, 좌, 우회전이 가능하다는 것이다. 이 때 모터는 가속, 감속의 미세 조정이 가능해야 한다. |
















