|
싣는 순서 : 1. 착용형 로봇의 역사와 현재
2. 착용형 로봇의 용도에 따른 기술적 특징
3. 착용형 로봇에서 사용자 의도 파악(HRI: Human-Robot Interaction)이란?
스마트폰으로 인한 모바일 IT의 혁명은 언제 어느 곳에서나 IT를 활용하여 세상과 소통할 수 있게 만든데 그 큰 의미가 있다 할 수 있다. 이제 성숙기에 접어든 모바일 IT 기술 분야를 대체할 수 있는 또 다른 분야에 대해 사람들의 관심이 모아지고 있고 그 후보 중심에는 로봇 기술이 있다. 특히 이번 칼럼에서는 수많은 로봇분야에서 착용형 로봇(Wearable Robot)에 관련된 분야를 다루고 독자 여러분에게 소개하고자 한다. 3개월에 걸쳐서 착용형 로봇 기술 발전의 역사, 세계 기술 현황, 적용 분야 및 핵심 기술 등을 다루고 이를 기회로 미래를 꿈꾸는 많은 이들이 머지않아 다가올 로봇이 여는 세상에서 핵심 동력 및 변화의 주체가 되기를 바란다.
착용형 로봇은 말 그대로 웨어러블 로봇(Wearable Robot)이라 총칭하고 그 특징에 따라 Power suit, Powered Exoskeleton, Exosuit 등과 같은 다양한 명칭으로 불려진다. 즉 사용자가 입고(또는 장착하고) 어떤 동작을 수행하는데 로봇이 착용자의 의도를 파악하여 힘을 보조하거나 지지 또는 지원 역할을 수행한다. 관련 기술은 더 나아가 착용자의 자세를 잡아주거나 민첩한 동작을 수행하는데 도움을 줄 수 있고 착용자의 인체 한계를 극복하거나 문제가 생길 외부 충격이나 힘 등을 미연에 방지하는 것에 또한 로봇이 그 역할을 할 수도 있다. 이러한 기술을 활용하여 중량물을 빈번히 다루는 작업자들의 힘 지원을 위한 근력 증강 착용형 로봇, 고령자들의 보행 및 생활 활동 지원을 위한 근력 지원 착용형 로봇, 재활 및 훈련을 위한 근력 보조 및 훈련용 착용형 로봇, 환자 보조를 위한 착용형 로봇, 장애 또는 신체 마비 등의 인체 불편함을 지닌 사람들을 위한 착용형 로봇 등으로 응용할 수 있다. 나아가 가상 공간에서의 감각을 복원 또는 재 구현할 수 있는 실감 구현 장치 나 재난 지역 같은 위험한 환경에서 인간의 작업을 위한 로봇의 원격 조정 장치, 훈련용 장치 등으로의 적용을 생각해 볼 수 있다. 기술의 발전이 최고조에 다다라 인체와 완벽히 조화될 수 있는 기술이 확보된다면 인간이 내는 힘의 물리적 한계를 뛰어넘는 슈퍼 인간 또한 꼭 꿈만이 아니다.
위의 소개된 착용형 로봇을 구현하기 위해 반드시 확보 또는 미래에 개발 되어야 할 기술은 기존의 로봇 기술을 포함하는 것은 물론 불편함 없이 내 몸과 같은 착용을 위한 인체공학적인 설계기술, 착용자의 동작 의도 파악을 위한 센서 융합 및 추론 기술(관련 기술은 HRI(Human-Robot Interaction, 인간-로봇 상호작용) 기술이라고 부름), 의도에 따른 로봇 행동을 정확하고 빠르게 수행하기 위한 로봇 제어 및 알고리즘 기술, 고강도를 갖고 경량을 유지할 수 있는 첨단 재료 응용 기술과 이를 적용하여 로봇 기구를 만들 수 있는 고급 기계 메커니즘 설계 기술 등이 특화 핵심 기술이라 할 수 있다.
최근 들어 관련 기술은 전 세계적인 관심을 받고 있는데 특히, 부지불식간에 SF 영화 또는 애니메이션 등의 매체를 통해서 다양하게 접해왔다. 로봇 기술의 비약적인 발전과 더불어 요즈음은 뉴스 등을 통해서도 드디어 그동안 상상해 오던 착용형 로봇의 초기 응용 형태를 실물로 볼 수 있게 되었다.
1. 착용형 로봇의 역사
SF 영화속에 등장한 착용형 로봇
| |
 |
|
| ▲ Edge of Tomorrow |
| |
 |
|
| ▲ Iron Man |
일찍이 로봇은 영화 ‘Star Wars’라는 대작으로 대중들에게 친숙해졌지만, 기술적 한계와 필요성 등으로 인해 주로 대량 생산을 위한 공장의 반복 작업라인과 같은 산업현장에서 인간의 노동력을 보조하거나 대체해왔다. 하지만 최근 과학기술이 급속도로 발전함에 따라 다시 로봇에 대한 관심이 커지고 적용 확대를 고민하고 있다. 로봇을 주제로 다룬 영화가 다시 흥행하고, 로봇은 안내로봇, 교육용 또는 오락용 완구, 로봇 청소기 등의 형태로 점차 우리 생활 속에 다양한 모습으로 조금씩 다가오고 있다.
| |
 |
|
| ▲ Elysium |
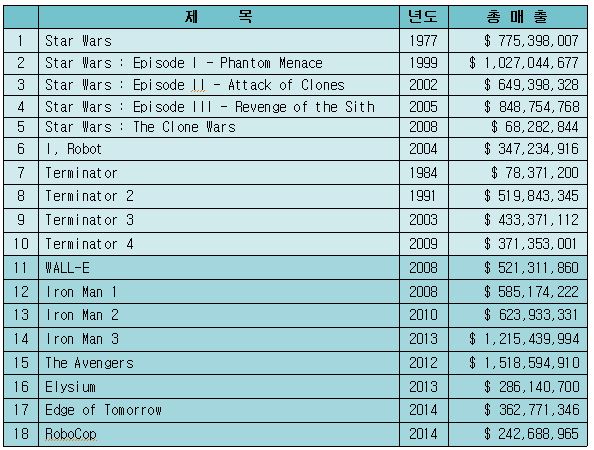
2008년에 개봉된 영화 아이언맨(Iron Man)이 흥행에 성공하면서 착용형 로봇은 세상에 강렬하게 등장하였고 자연스럽게 관련 로봇을 연구해오던 관계 기관들은 연구에 박차를 가하게 되었다. 아래 표는 로봇이 등장하는 영화와 관련 매출을 보여주고 있고 12번부터 18번 까지는 착용형 로봇이 등장하는 영화이다. 따라서 로봇 영화의 최근 트렌드를 보아도 착용형 로봇에 대한 사회적 관심이 얼마나 큰지 엿볼 수 있다. 최근 개봉 영화들인 ‘엘리시움’과 ‘엣지 오브 투마로우’는 착용형 로봇의 군사적 활용에 대한 전형적인 모습을 보여준다 할 수 있다.
| |
 |
|
| ▲ 출처: http://www.boxofficemojo.com/ |
최근 기술의 발전
근래에 들어와서 과거에 비해 로봇을 만드는데 필수적인 몇 가지 기술적 어려움들이 빠른 속도로 개선되고 있다. 합금을 이용한 소재의 경량화 문제, 연산 처리의 고속화, 구동기와 기구 부품류의 내구성 및 효율의 개선, 다양한 센서의 등장과 고정밀화 등을 그 예로 들 수 있는데 반해 아직까지 기구 무게 대비 강성, 구동기 출력 개선, 배터리 효율 등의 요원한 문제들이 존재함도 부인할 수 없다. 하지만, 바람직한 측면은 과거에 비해 다분히 비약적인 요소기술의 발전으로 그동안 상상과 개념 속에서만 머물러온 착용형 로봇의 적용을 위한 실제적 접근이 가능해진 것이다. 이에 각국의 관련 연구진들은 경쟁적으로 역사에 기념비적인 이정표를 세우기 위해 연구 개발에 속도를 올리고 있다.
2. 착용로봇의 시초
| |
 |
|
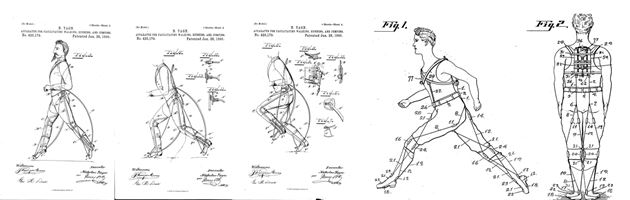
| ▲ 그림1] Nicholas Yagn이 개발한 최초 착용로봇의 개념도 |
최초의 착용형 로봇
수동 액츄에이터에 기반을 한 착용형 로봇 개념에 대한 최초의 특허는 1890년 러시아인 Nicholas Yagn 으로부터 나왔고 외골격 로봇에 관한 컨셉에 대해 언급 하였다. 제안 발명의 목적은 걷기 뛰기 점프 동작의 효율성 증대와 피로감소, 좀 더 다리를 쉽게 구부릴 수 있는 기구의 제작이다.[그림1 참조] 이후 1917년에 미국의 발명가 Leslie C. Kelley가 “pedomotor”로 명명한 증기의 힘으로 작동되는 착용형 로봇의 개념을 제안하였다.
착용형 로봇 연구의 시작
코넬 대학교 항공 연구소(Cornell Aeronautical Lab.)에서 외골격 로봇이란, 사람보다 훨씬 적은 자유도를 가졌지만, 사람이 수행하는 대부분의 동작을 수행할 수 있는, 사람의 몸 모양을 따라 형성된 외부 구조물이라고 정의한 바 있다. 이는 미 공군으로부터 의뢰받은 연구를 수행하면서 도출된 개념이다.
1960년대 초반, 미국 국방부가 “Powered suit of armor", 즉 군인을 대상으로 중량물을 들어 올리는 능력, 이송하는 능력을 증강을 증강해주는 장치에 관심을 보였고, 1962년, 미국 공군은 코넬대 항공 연구소로 하여금 마스터-슬래이브(Master-Slave) 방식의 인간 근력 증강 로봇시스템의 가능성을 연구하도록 하였다.1960년부터 1971년까지 제너럴 일렉트릭(General Electric)사는 마스터-슬래이브 시스템의 근력 증강 로봇, ‘Hardiman’을 개발, 시험하였다. Hardiman은 착용자의 몸을 감싸는 외골격 장치 세트이다. 바깥쪽의 외골격 로봇은 안쪽에 있는 착용자의 동작을 따라가게 된다. 몇몇의 외골격 로봇이 벨그라드(Belgrade) 대학에서 1960년대 1970년대에 신체 마비 환자들을 도울 수 있도록 개발되었다. 초기 이 시스템은 미리 설정된 움직임을 재현하는데 성공했을 뿐이지만, 균형을 잡는 알고리즘은 아직도 여러 이족보행 로봇에 쓰이고 있다.
3. 해외 연구 현황
군사용
| |
 |
|
| ▲ DARPA의 지원을 받아 이시온(Raytheon)사가 개발한 XOS2(XOS exoskeleton) |
HULC (Human Universal Load Carrier)는 미국 버클리(Berkeley) 대학교 Bionics 연구실에서 개발한 착용로봇으로 미국의 록히드마틴사에서 독점 생산 지위를 갖고 있으며 최대 90kg의 군장을 메고 순간 최고 속도 16km/h로 기동 가능을 목적으로 개발되었다. 최대 작전반경 20km에 달하고 동력원으로는 리튬폴리머 배터리 또는 연료 전지를 사용하며 배터리를 제외한 로봇의 총 중량은 24kg이다.
XOS2(XOS exoskeleton)는 2000년부터 DARPA의 지원을 받아 레이시온(Raytheon)사의 스티
| |
 |
|
| ▲ 미국 록히드마틴에서 생산하는 HULC (Human Universal Load Carrier) |
브 제이콥슨(Steve Jacobsen) 박사팀에서 2008년 개발한 전신 근력증강 로봇으로 2010년 처녀 개발된 XOS1에 비해 성능은 유사하게 유지하면서 전력소모를 반으로 줄였다. XOS2는 자체무게 68kg, 가반하중 90kg으로 내부에 내연기관을 탑재하고 8시간을 운용할 수 있다.
프랑스 RB3D에서 2011년 개발한 군사용 웨어러블 ‘HERCULE’
| |
 |
|
| ▲ 프랑스 RB3D에서 2011년 개발한 군사용 웨어러블 ‘HERCULE’ |
프랑스에서는 국방부와 무장청(DGA, Directorate General Armaments)의 지원으로 RB3D에서 2011년 개발한 HERCULE은 약 100kg의 가반하중으로, 구동기로 전기모터를 사용하며 4kph의 속력으로 최대 20km까지 기동 가능하다.
복지용
| |
 |
|
| ▲ 일본 사이버다인(Cyberdyne)이 생산하는 HAL (Hybrid Assistive Limb) |
일본 사이버다인(Cyberdyne)이 생산하는 HAL (Hybrid Assistive Limb)
HAL (Hybrid Assistive Limb)은 1991년부터 일본의 츠쿠바 대학의 산카이(Sankai) 교수팀에서 개발하여 사이버다인(Cyberdyne)사에서 생산하고 있다. 현재까지 HAL-5까지 개발되었으며 전신 모델 HAL-5의 총 무게는 23kg에 달하고, 하지부분의 무게는 15kg정도 나가며 배터리로 운용할 경우 2시간 40분 정도 사용 가능하다. 최대 70kg에 해당하는 무게를 들어 올릴 수 있다. HAL은 착용자의 의도를 근전도 신호를 처리하여 얻을 수 있는 것이 핵심이고 이러한 의도 파악 기술은 대량생산 및 적용의 어려움이 존재하나 힘이 약한 동작 의도를 파악하는데 장점이 있다. 따라서 일반인에 비해 근력이 떨어지는 장애인이나 고령자를 대상으로 활용될 수 있다.
| |
 |
|
| ▲ 미국 버클리 엑소 바이오닉스(Berkely Ekso Bionics)사에서 개발한 장애인을 위한 보행 보조 기구 ‘e-LEGS’ |
e-LEGS는 군사용 외골격 로봇인 HULC를 만든 미국 버클리 엑소 바이오닉스(Berkely Ekso Bionics)사에서 개발한 장애인을 위한 보행 보조 기구이다. 자체 무게 20kg이며 시속 3.2km로 움직일 수 있고 힘 센서와 모션센서로 착용자의 동작을 인식하여 제어하는 방식으로 배터리 기준 6시간 이상 사용할 수 있으며 걷기, 오래 서있기, 앉은 상태에서 일어서기 및 다시 앉기에 관한 동작 인식 및 지원이 가능하다.
산업용과 기타
| |
 |
|
| ▲ Power Loader의 초기 모델 |
| |
 |
|
| ▲ 일본 Activelink사의 Power Loader |
파워로더(Power Loader)는 일본 파나소닉(Panasonic) 회사의 자회사인 액티브링크(Activelink)사에서 만든 근력증강 로봇으로 무게 약 230kg으로 모터 18개가 탑재되어 최대 110kg의 짐을 옮길 수 있는 것이 특징이다.
| |
 |
|
| ▲ 나사에서 우주비행사들을 위해 만들어진 착용로봇 ‘X1’ |
나사에서 우주비행사들을 위해 만들어진 착용로봇 ‘X1’
X1은 우주에서 비행사들의 근력을 유지하도록 돕고, 지구로 귀환했을 때 약해진 근력을 보조해 빨리 걷도록 도울 목적으로 2012년 미국 나사(NASA)와 IHMC(The Florida Institute for Human and Machine Cognition)가 공동으로 개발한 착용형 외골격 로봇이다.
4. 국내 연구 동향
군사용
국내에서는 국방과학연구소에서 가반하중 45kg, 평지 보행속도 4kph 수준의 유압식 하지근력증강 로봇을 자체 연구하였고, 최근 병사들을 위한 군장비등의 고하중을 지지하며 고속 보행 할 수 있는 하지 착용형 로봇을 연구 중에 있다.
국방무인화기술 특화연구센터가 있는 KAIST에서는 명지대와 공동으로 인체의 운동 메커니즘 분석, 보행 시 지면충돌 소모에너지 해석, 생체신호 분석 및 근력보조 시스템 제어와 관련하여 기초 연구가 진행 중이다.
산업용
| |
 |
|
| ▲ 현대로템에서 개발중인 산업용 유압식 근력증강로봇 |
현대자동차는 현대로템사와 함께 산업노동을 지원하기 위한 근력증강로봇을 개발 중에 있다. 적용 대상에 따라 전기로 구동하는 모터 방식과 유압으로 구동하는 방식의 두 가지 타입으로 전신 근력 증강 착용형 로봇을 연구하고 있으며 40kg에서부터 80kg까지 의 무게를 다루는 작업자를 위한 로봇을 개발하는 것이 목표이다.
노약자와 장애인용
LG전자에서는 노약자/장애인을 위한 생활지원 및 근력 보조 시스템인 스마트 모바일 워커를 개발한 바 있다.
| |
 |
|
| ▲ LG전자에서 개발한 스마트 모바일 워커 |
이와 더불어 NT리서치 에서는 근력증강용 로보웨어를 개발하여 판매 중에 있으며 재활용 보행보조 로봇으로 한국생산기술연구원에서 만든 로빈과 군사용 목적으로 만든 보행 근력 지원 로봇이 있고 서강대학교 전도영 교수연구실 에서는 고령자 보행 지원을 위한 슈바(SUBAR) 로봇을 포함 다양한 로봇이 개발되어 있다. 한양대 한창수 교수연구실 에서 하지 보행 지원 로봇과 상체 팔 근력 지원을 위한 착용형 로봇 등을 오랫동안 연구해오고 있으며 최근 관련된 기술 및 노하우를 기업에 전수해 주고 있다. 저자가 속해 있는 광운대 생체모방제어&로봇 연구실 에서는 인체의 부위별 특화 동작 및 작업 지원을 위한 착용형 로봇을 연구하고 있는 동시에 전신 착용로봇의 다양한 응용을 위한 착용자 의도파악 및 로봇 제어 기술 개발에 집중하고 있다.
[이미지 및 자료출처]
www.ropeofsilicon.com/ www.tls0083.egloos.com/ www.thelandofshadow.com/
www.google.com/ www.lockheedmartin.com/ bleex.me.berkeley.edu/
www.army-technology.com/ www.cyberdyne.jp/ www.eksobionics.com/
www.tomsguide.com/ www.gizmag.com/ www.nasa.gov/ www.munhwa.com/news/
utrc.kaist.ac.kr/ news.yeogie.com/ www.msip.go.kr
Proceedings of 2012 IEEE, International Conference on Mechatronics and Automation, August 5-8, Chengdu, China.
Proceedings of the 2005 IEEE, International Conference on Robotics and Automation, Barcelona, Spain, April 2005.
* 본 기사는 '월간로봇' 9월호에서도 볼 수 있습니다. 모든 표기는 '월간로봇'의 규정에 따랐습니다.
|
















