|
홍현수 박사는 고려대학교 재료공학과를 나와 부산대학교 재료공학과 석사와 광운대학교 방위사업학과 박사학위를 취득했다. 현재 국방기술품질원 전문위원(항공 및 함정 분야)이며, 국방기술품질원 책임연구원과 광운대학교 방위사업학과 겸임교수로 있다.
서론
무인해양체계(Unmanned Maritime System, UMS)는 무인지상 및 무인항공체계와 마찬가지로 인명을 구하는 등 인적 위험이나 손실을 줄여 주며, 지속적인 감시를 제공하고 아울러 유인체계에 비해 상대적으로 운용비를 줄여 줄 수 있는 잠재력을 가지고 있는 시스템이다. 또한 최근 해군 임무를 수행하기 위한 무인시스템이 빠르게 성장하고 있으며 이에 따라 무인시스템들의 새로운 능력들을 이용하고자 하는 해군 작전 영역 역시 급속도로 확대되고 있다.
| |
 |
|
| ▲ 그림 1] Elbit Systems사의 무인수상함 SILVER MARLIN |
과거 해군의 무인체계 획득은 공중작전을 위한 장비탑재 무인항공기나 화물운반을 위한 무인헬기, 또는 선박의 화재 진압 등 기타 임무수행에 초점을 맞추어 왔으며 이러한 무인체계 개발과정에서는 추진력 확보 기술이나 장거리, 장시간 임무 수행을 위한 연료급유 문제 등의 해결을 위한 기술개발도 동시에 이루어졌다.
무인해양체계는 무인잠수정(Unmanned Underwater Vehicle, UUV)과 무인수상정(Unmanned Surface Vehicle, USV) 등 2가지 하위 항목으로 구분된다. 무인수상정은 일반적인 선형, 수중익선, 반잠수정 등 수면과 거의 지속적으로 접촉하면서 운용되는 무인해양체계이다. 무인잠수정은 통신 목적을 위해 수면 가까이에서 운용되기도 하지만 일반적으로 수면과 접촉 없이 운용되도록 제작되었으며, 일부 무인잠수정은 비밀리에 운용되기도 한다.
오랜 기간 동안 해양 무인시스템의 임무는 표적추적 훈련용으로만 제한되었지만 최근 들어 새로운 장비들이 해양무인시스템의 가치를 증명해 주고 있다.
먼저 해양 기뢰의 위협에 대항하기 위한 주요 도구로서 원격조정 무인잠수정(Remotely Operated Vehicle, ROV)이 신속하게 자리를 잡은 점을 들 수 있다. 다음으로는 기타 수중 기기들이 등장하였고, 그 중 일부는 모함과 연결된 케이블도 필요하지 않아 무인잠수정이라는 이름이 붙었다. 또한 사람이 개입하지 않고 길고 복잡한 임무를 수행할 능력이 있는 경우 자율수중무인정(Autonomous Underwater Vehicle, AUV)이라는 이름이 붙었다. 이러한 현상은 수상에서도 일어났는데, 수많은 임무들을 위해 무인수상정들이 탄생하였다.
무인해양시스템이라는 용어는 무인해양체(Unmanned Maritime Vehicles, UMV)를 포함하는데, UMV는 UUV(즉 모든 ROV, UUV, AUV) 및 USV 그리고 요구되는 임무를 완수하기 위해 필요한 그것들의 완전히 통합된 센서와 탑재물들이 포함되는 시스템을 의미한다. 따라서 UMS는 이제 미국 국방부에서 공식적으로 사용하게 되어 상기한 ROV, UUV, AUV, USV를 대체하는 용어가 되었다. 그러나 공식적으로 인정된 용어 이외에도 ‘전통적인’ 용어들이 여전히 더욱 널리 이해되고 사용되고 있다. 미국 해군도 전체 업무를 관장하기 위해 특별히 UMS계획실(UMS Program Office, PMS 406)을 설립하였다.
폭넓고 빠르게 성장하고 있는 UAS 이외에도 수상 및 수중 무인시스템(Surface and Underwater Unmanned System, SUUS)등도 이제는 예산확보 측면에서 점점 더 유리한 고지를 선점해 나가고 있다.
대기뢰전 방책(Mine Countermea sures, MCM) : 무인시스템의 새로운 능력
미군은 USV와 UUV가 유용할 것이라고 입증된 많은 분야들을 기술함으로써 서로 다른 유형의 임무를 완수하는 데 있어 이들에게서 필요한 특수한 요구조건들을 식별해냈다. 여기에는 대잠전(ASW), 정보・감시・정찰(ISR), 전자전(EW), 대수상전, 특수부대 지원은 물론 기뢰전, 항만 및 부대방호 등의 임무가 포함된다.
‘더럽고, 지루하고, 위험한’ 임무를 수행해야하는 대기뢰전 분야는 해군 무인시스템이 가장 잘 발달된 분야이다. 기뢰가 설치된 해역에 인력의 투입 없이 위협을 제거하는 긴급한 임무들은 잘 수행되어 왔었고 전통적인 원격조종무인잠수정(ROV)에서 좀 더 복잡하고 자율적인 시스템으로의 전환이 가능해지고 있다.
기뢰 수색과 처리에 추가로 MCM 부대가 소해(sweeping) 임무를 수행할 것을 요구하고 있는 것이 현재의 추세이다. 광범위한 지역에 산재되어 있는 수많은 기뢰들(해저기뢰 또는 정박기뢰)의 존재로 인해 해군의 정책입안자들은 MCM 기술을 다시 생각하면서 오래된 방법인 소해를 다시 도입하게 되었고 여기에 무인 플랫폼의 채택처럼 새로운 방법을 추가 적용하고 있다.
소해(Sweeping)
Atlas Elektronik사는 무인 단정에 의한 소해기술인 FAST (Flexible Agile Sweeping Technology)를 현재 영국 해군의 MCMV 소해함과 미래 MCM-수로-정찰 능력(MCM-Hydrographic- Patrol Capability, MHPC)개발 프로그램을 포함한 많은 잠재적인 국제고객들에게 제안하고 있다.
| |
 |
|
| ▲ 그림 2] 기뢰 소해용 USV SAM 3 |
아틀라스 일렉트로닉(Atlas Elektronik)사의 공통통합 MCM시스템(Common, Inte- grated MCM System, C-IMCMS)의 구성부품 FAST는 다양한 유형의 감응소해장치(Influence Sweep)를 예인하거나 선체에 감응소해장치를 직접 장착할 수도 있으며 소해 툴 박스에는 자기, 음향, 전기 감응(UEP/ELFE) 발생기 세트도 포함되어 있다.
탈레스(Thales사)는 11.5m 자율수상함정(Autonomous Surface Vessel, ASV)을 개발하였고, 이를 MHPC 프로그램뿐만 아니라 HUNT-급 MCMV의 단기 업그레이드 버전으로 제안하고 있다.
다른 측면에서 네덜란드 해군의 ALKMAAR급 MCMV 3척은 현재 네덜란드 원격조종감응소해시스템(Netherlands Remote Controlled Influence Minesweeping System, NLRCIMS) 프로그램의 일환으로 개조되어, 4대의 소해 무인정에 대한 통제 모함으로 운영되고 있다.
스웨덴 해군은 치센크루프 코콤(ThyssenKrupp Kockums) 사에서 제작한 14톤급 자체추진 음향/자기 기뢰소해(Self-Propelled Acoustic/ Magnetic Mine Sweeper, SAM-3)쌍동선(Catamaran)을 운용하고있다.
이 소해함정은 모듈형식과 원정임무를 위해 특별히 설계되었는데, 40ft 표준컨테이너를 이용하여 쉽게 운송할 수 있고 높은 충격을 흡수할 수 있도록 10개의 공기 챔버가 공기부양단정 주위에 설치되었으며, 갑판실들은 함정의 주 프레임에 탄력적으로 설치되었다. 또한 SAM-3를 이용하여 프로그래밍이 가능한 소해장치를 예인할 수 있으며, 부두나 해안에서도 조종이 가능하다. 운반속력은 12kts이며 항속거리는 예인 속력 8kts로 300해리이다.
| |
 |
|
| ▲ 그림 3] UISS의 prototype 시험장면(2011.10.) |
대서양의 또 다른 쪽에서는 미 해군이 연안전투함(Littoral Combat Ships, LCS)을 위한 MCM 임무 패키지를 고안하고 있는데 무인감응소해시스템(Sustained Influence Sweep, Unmanned Influence Sweep System, UISS)이 2015년에서 2016년 사이에 소위 인크리먼트(Increment) III라 불리는 소해시스템 개발 사업에 포함될 예정이다.
UISS는 연안지역에서 음향이나 자기 감응기뢰의 위협을 원거리에서 제거하는 능력을 지닌 반자동 소해로봇으로 무인수상체(Unmanned Surface Vehicle)와 수상체 뒤 부분에서 견인되는 자기, 음향감응기뢰제거시스템(그림 3에서 오렌지 색 부분) 등 2개의 부분으로 구성되어 있다.
감응형 기뢰소해 모듈은 Textron-AAI 공통 USV(Common USV, CUSV) 및 ITT Exelis-EDO 무인수상소해시스템(Unman- ned Surface Sweep System, US3)으로 구성되어 있다.
함정 자체가 연구단계에서 MCM 임무패키지로 이미 이전되었지만 개선형 다중로봇작동통제유닛(Improved Multi-Robot Operator Control Unit), UxV임무관리감독(Supervision of UxV Mission Management by Interactive Teams, SUMMIT), 자동화지원컨테이너모니터링(Automated Support Container Monitoring)등과 같은 함정과의 인터페이스에 관련된 이슈들이 해결하여야 할 과제로 남아 있다.
| |
 |
|
| ▲ 그림 4] Textron-AAI사의 Common USV |
4대로 이루어진 한 배치(batch)의 첫 번째 함정 두 척이 광범위한 평가를 위해 이미 미 해군에게 인도되어, ‘Trident Warrior’ 훈련 중에 시험이 이루어졌다. 연안 환경에서 음향 및(또는) 자기 감응기뢰의 위협에 대응하는 UISS는 모선으로부터의 이격거리는 8~12 해리이고 지속 운용시간이 긴 반-자율적인 소해 능력을 LCS함에 제공한다. UISS의 규격은 아직 결정 결정되지 않았으며 개발 계약이 이루어지면 계약 업체와 해군이 공동으로 규격 확정 작업을 하게 될 것이다. 예를 들면 AAI사는 자사가 기술을 보유하고 있는 Common Unmanned Surface Vessel 모델이 UISS의 기본 형태가 되기를 희망하고 있다. 미 해군은 현재 24개의 MCM 패키지에 대해 각각 1대의 UISS, 6개의 훈련 시스템, 22개의 대체용 시스템 등 총 52개의 시스템을 요구할 계획이며 2015년 중반까지 소량 초도생산 계약을 체결할 예정이다.
이탈리아 해군은 기뢰소해, 기뢰재밍(jamming), 기뢰탐지 등의 다중임무 수행을 위하여 현재 소형 USV를 시험 중에 있다. 소형을 사용하는 이유는 본질적으로 가격이 저렴하고, 기존의 소해함에 쉽게 장착할 수 있거나 소해선박 또는 해안에 위치한 모듈 패키지 내에서도 사용할 수 있기 때문이다.
통합형 대기뢰전방책 USV
지금까지 언급한 함정들 중 일부는 기뢰를 탐지하고 식별하기 위해 예인배열(Towed Array)소나를 이용하고 기뢰처리함을 이용하여 한 번에 기뢰를 제거하는 논스톱(one-pass)기뢰처리 작전을 위한 능력도 평가되었다.
이미 언급한 FAST도 원격조종 SEAFOX 기뢰처리함(Mine Destruction Vehicle, MDV)에 의해 기뢰의 식별 및 처리 임무 수행이 가능하다. 이 경우 기뢰처리함(또는 임시 소해선박)으로부터 무선신호가 FAST로 전달되고, 연결 케이블을 통해 FAST로부터 다시 SEAFOX로 전달되며 역방향으로도 동일한 방식으로 전달되는 방식으로 조종된다.
| |
 |
|
| ▲ 그림 5] STERENN DU |
프랑스 해군도 DCNS사와 Thales사 그리고 ECA사로 구성된 컨소시엄에 의해 이와 비슷한 방법을 개발하고 있는데, 훨씬 더 크고 능력을 갖춘 플랫폼을 이용하고 있다. ESPADON(프랑스어로 황새치(Swordfish))라 불리는 이 사업에 대한 타당성 연구 계약이 2009년 7월에 해당 컨소시엄과 체결되었다.
2010년 12월 대형 무인수상정인 STERENN DU함(영국 지역 사투리로 ‘검은 별’을 의미)이 Morbihan에서 진수되었다. 길이가 17m이고 배수량이 25톤인 무인쌍동선은 설계 개념 검증을 위한 광범위한 시험이 이루어졌으며, Thales DUBM-44 예인배열소나와 ECA K-STER 기뢰제거기를 탑재하고 있다.
| |
 |
|
| ▲ 그림 6] K-STER가 달린 ECA사의 INSPECTOR |
STERENN DU는 비록 SLAM-F (Future) 개념의 주요 목표가 기뢰가 매설된 해역에서 인간이라는 요소를 완전히 배제하고 무인자산을 투입하는 것이지만, 옵션으로 승조원이 탑승할 수도 있다. STERENN DU는 또한 기뢰의 탐지, 분류, 위치파악을 위해 SAMDIS 합성개구측면스캔소나(Synthetic Aperture Sidescan Sonar, SAS)가 장착된 ECA Robotics사의 Alister 18(3.5m) 또는 Alister 18-TWIN(3.3m) 등의 비교적 대형 AUV를 해상상태 4(파고 2.5m)에서까지 전개 및 회수할 수 있다.
프랑스의 또 다른 개발 무인정은 2008년에 공개된 ECA Robotics사의 INSPECTOR MkⅡ이다. 이는 재배열이 가능한 USV로서 안테나 센서뿐만 아니라 사이드스캔소나 및 다중 빔 에코 사운더 등 많은 수중 센서를 운반할 수 있다. 프랑스 해군은 8대를 주문하였다.
| |
 |
|
| ▲ 그림 7] 덴마크의 HOLM급 무인소해정 MSD5 HIRSHOLM함 |
Saab사는 덴마크 해군(Royal Danish Navy)이 2007년부터 사용한 (HOLM급) 복합샌드위치 선체(Composit Sandwich Hull) 함정인 길이 29m의 자사 무인소해정(Mine Sweeping Drone)을 제안하였다. 이 무인정은 수송 또는 훈련목적으로는 유인 함정으로, 소해작전을 위해서는 무인으로 사용되며 2대의 소형 MSF 드론 소해정을 견인하는 통제함으로서도 사용된다.
HOLM급은 또한 Saab사의 DOUBLE EAGLE ROV를 장착하여 기뢰 인근에 폭약을 설치하고 기뢰를 분류 및 처리할 수도 있다. 그러나 이 경우 전개-회수 작전은 필수적으로 사람이 수행해야 하는데 무인정을 나중에 보내고, 통제 유닛으로 사용되는 임시소해선박 선상에서 기다려야 한다. 따라서 완전한 무인 기뢰소해작전을 달성하기 위해 추가적인 개발이 요구된다.
기뢰처리정 (Mine Disposal Vehicle)
| |
 |
|
| ▲ 그림 8] 표류 기뢰에 부착된 COBRA |
Atlas Elektronik사의 MDV인 SEAFOX는 몇몇 해군에서 사용되고 있는데 그동안 개선과정을 통해 지속적으로 성능개량이 이루어졌다. 예를 들면 2005년 SEAFOX Mk II는 부유기뢰 및 표류기뢰를 제거할 수 있는 능력을 갖추게 되었고, 2010년에 SEAFOX Mk III에는 다른 유형의 신관이 장착되었으며, 기뢰와 유사한 물체는 제거하지 않는다는 결정이 내려지면 함상에서 안전한 회수가 가능하다. SEAFOX는 3가지 버전이 있는데, 첫 번째로 가장 보편적인 것은 SEAFOX-C(Combat)로서 성형장약 탄두가 장착되어 있으며 SEAFOX-T(Training)는 훈련용이다.
SEAFOX-I(Inspection)는 자율작동을 위해 관성항법시스템과 360° 전방관찰 소나가 장착되어 있고 신속한 수중정찰과 항만 감시, 접근 및 정박물체 등에 대한 감시를 수행할 수 있고 물론 훈련용으로도 사용될 수 있는 단순하면서도 경제적인 솔루션이다. 최근의 개량형은 SEAFOX-COBRA인데, 이것은 매우 합리적인 가격에 높은 안전성을 제공하는 폭발물 제거도구로서 다양한 목표물들을 제거할 수 있다. 여기에는 불발탄, 부유 및 표류기뢰, 그리고 매우 얕은 해역에 있는 상륙저지 장애물 등이 포함된다. SEAFOX-COBRA는 덮개를 분리할 수 있고 폭약은 원거리 RF-코드 명령에 의해 폭발되며, SEAFOX-I의 전방에 부착된다.
ECA사가 제시하고 있는 K-STER는 언뜻 보면 다소 이상한 MDV로 보이지만, 기뢰 식별 및 제거를 위한 향상된 임무 수행을 위해 기뢰 주위에서 최적의 위치를 잡을 수 있도록 기울어지는 머리가 달려 있다. K-STER는 인도, 싱가포르, 리투아니아 등의 국가에서 운용하고 있다.
| |
 |
|
| ▲ 그림 9] ECA의 K-STER |
K-STER는 K-STER Neutralization 및 K-STER Identi- fication 등 2종류의 버전이 제공되고 있는데 후자는 비활성탄두가 장착되어 있다. 감시 임무를 위한 K-STER의 변형모델인 SEA-SCAN은 군용 및 민간 해안 산업 사용자 모두에게 제공되고 있다.
흥미로운 진화라고 말할 수 있는 MDV로도 무장된 AUV는 BAE Systems사가 제공하고 있다. 그들은 자사의 TALISMAN-M AUV의 탑재물로서 ARCHERFISH를 평가하였는데 TALISMAN-M은 최대 4대의 ARCHERFISH를 장착할 수 있으며 이론적으로 상당한 범위에 걸쳐 완전히 자율적이면서 비밀적인 기뢰소해임무를 수행할 수 있다.
Kongsburg사도 자사의 MINESNIPER의 소형 변형모델인 MINESNIPER NEUTRON을 제시하고 있는데, 이 모델은 Saab사의 DOUBLE EAGLE SAROV(Semi-Autonomous ROV)와 통합되도록 설계되어, 후자를 완전한 기뢰제거시스템으로 변신시켜준다.
자율 탐색 (Autonomous Searching)
AUV에 있어 가장 특징적인 변화로는 다른 임무보다도 특히 비밀 기뢰정찰, 수로 탐색(hydrographic survey), 해저맵핑(mapping), 신속환경평가(Rapid Environmental Assessment, REA), 항로탐색을 수행하는 데 사용되는 소형, 중형, 대형 AUV가 매우 많아졌다는 점이다. 요즘에는 130종이 넘는 AUV가 민용 및 군용 또는 민군겸용으로 판매되고 있다. Kongsberg Maritime사(전신은 Hydroid)의 REMUS-100(미군의 Mk-18 Mod1 Swordfish)은 아마도 가장 잘 알려진 소형 휴대형 AUV일 것이며 소형보트에서도 발사할 수 있다. 이 모델은 전 세계 대부분의 해군이 사용하면서 성공을 거둔 AUV이다.
이 모델보다 큰 REMUS 600은 영국 해군과 미 해군(Mk 18 Mod2 KINGFISH), 일본 해상자위대가 사용하고 있다. 이 모델은 수심 600m에서 최장 45시간 동안 작동할 수 있다.
| |
 |
|
| ▲ 그림 10] REMUS 600 AUV |
환경 데이터 조사 외에도 REMUS 600은 보통 사이드스캔소나(SSS)를 장착하고 있으나, 옵션으로 프로파일링소나(Profiling Sonar), SAS, 해저지층탐사(Sub-bottom Profiling), 전자스틸카메라(Electronic Still Camera, ESC) 등의 기타 센서와 관련 조명 및 비디오카메라 등을 장착할 수 있다.
Kongsberg사도 HUGIN 1000을 생산하고 있는데, 수심 1,000m까지 잠수할 수 있으며 노르웨이 해군, 핀란드 해군, 이탈리아 해군이 사용하고 있다. 이 모델의 기본 탑재물 센서 슈트는 HISAS 1030 간섭측정 SAS, 멀티 빔 에코 사운더, 혼탁도 감지 센서(Turbidity Sensor), 조류 탐사, 고성능 광학 영상 시스템으로 이루어져 있다.
| |
 |
|
| ▲ 그림 11] Kongsberg Marine사의 수중무인체 ‘MUNIN’ |
또한 2014년 1월에 Kongsberg Maritime사는 연안 감시 및 조사를 위한 무인 수중체인 ‘MUNIN’를 공개할 예정이라고 밝혔다. 이 UUV는 서베이 등급의 포지셔닝 시스템에 의해 지리를 참조하는 고해상소나(수중음파탐지기) 데이터를 수집하도록 설계되었다. 모듈식 구조를 갖춘 이 무인 수중체는 추가 배터리 장착이 가능하여, 거의 5,000ft에 달하는 깊이에서 임무 작동 시간을 24시간까지 연장할 수 있다. 이 UUV의 길이는 구성에 따라 다르나 대략 10~14ft에 이르고 지름의 크기는 14인치로, 공기 중 무게는 662lb이다. Kongsberg Maritime사 설계자들은 HUGIN 및 REMUS UUV를 개발 및 제조했던 경험을 기반으로 이 무인 수중체의 개발을 이끌어냈다.
ECA사는 휴대용 자율무인잠수정인 ALISTER-9(다양한 구성에 따라 1.7~2.5m, 50~90㎏)를 제시하고 있으며 작전수심은 100m이다. 더 큰 모델인 ALISTER-18도 가용한데, 가장 무겁고 능력이 월등한 프랑스 AUV는 길이가 5m, 무게는 800~1,000㎏이고 운용 심도는 60m, 지속 운용시간은 30시간에 달하는 ALISTER-27이다.
Atlas Elektronik사는 완전한 범위의 AUV인 SEACAT, SEAOTTER Mk Ⅰ, SEAOTTER Mk Ⅱ를 제시하고 있다.
| |
 |
|
| ▲ 그림 12] 합성개구 사이드스캔소나(SAS)가 장착된 SEAOTTER II |
SEACAT은 하이브리드 AUV-ROV로서, 변화하는 임무에 대해 신속하게 적용할 수 있는 SWAPHEAD 기술을 적용한 독특한 교환 가능한 센서 헤드가 있다. 무게가 1,100㎏에 달하는 좀 더 큰 SEAOTTER Mk Ⅱ는 독일 해군에서 사용 중이며 Vision-600 합성개구소나(Synthetic Aperture Sonar)를 장착할 수 있다.
자율적으로 작동하거나 원거리에서 조종할 수 있는 무인정도 있는데 이들에 대한 정의는 상당히 임의적이다. 예를 들어 Atlas SEACAT은 연결케이블을 이용하거나 또는 이용하지 않고 작동이 가능하며, 복합 AUV라고 불린다.
| |
 |
|
| ▲ 그림 13] 무선 buoy가 달린 PLUTO Plus |
Saab사의 DOUBLE EAGLE Mk II와 Mk III는 최근에 반-자율형 변형모델인 DOUBLE EAGLE SAROV Hybrid로 제안되었다. SAROV 패키지에는 자율 작동 및 수중도킹 능력이 포함되어 있다. 이를 통해 DOUBLE EAGLE Mk II/III 역시 연결 케이블을 이용하거나 또는 이용하지 않고 작동할 수 있어 사용 범위와 범용성이 확대된다. 또한 이 패키지는 얕은 해역이나 항구와 같은 어려운 지역에 대한 기뢰탐색과 수중안전 작전을 위한 능력도 확장시켜 준다.
Gaymarine사의 PLUTO Plus 및 PLUTO Gigas도 무선통신 부표, GPS 수신기, 초단파 음향 기준선(baseline)을 이용하여 무인정의 정밀한 수중 위치를 인식할 수 있는 반-자율(Semi- Autonomous)성능을 가지고 있다.
무인정의 제어와 탑재된 센서(TV카메라 및 소나)로부터 수집된 데이터는 광대역 무선주파수 링크에 의해 처리되어진다. 모함이 접근할 수 없거나 케이블이 장애물에 걸릴 위험이 있는 조건에서도 모함으로부터 더 멀리 떨어져서 작동할 수 있으며 이때 이격거리는 최대 5㎞ 이상이다. 이탈리아 해군은 2013년 2대의 R-ROV를 구매하였다.
부대 방호 및 항만 안전
무인시스템은 기상조건에 크게 얽매이지 않고 오랜 시간 동안 정찰을 수행할 수 있도록 해줌과 동시에 폭발물이나 무장한 테러리스트들이 탄 보트와 대면하는 경우와 같이 갑자기 발생하는 위험으로부터도 안전을 보장해 준다.
| |
 |
|
| ▲ 그림 14 ] Rafael사의 PROTECTOR |
Rafael사의 PROTECTOR는 10년 가까이 사용된 유일한 성숙된 해양보안용(Maritime Security) 수중무인정이며 최초로 작전 상태를 달성한 기종이기도 하다. PROTECTOR의 모듈 설계는 7m, 9m, 11m 깊은-V형 알루미늄 선체를 적용할 수 있다. 생존성을 위해 밀폐된 차단벽(Sealed Bulkheads)과 발포 성형된 D-collar를 보유하고 있다.
PROTECTOR의 가장 중요한 능력은 플랫폼 제어 및 센서에 적용하는 더블 데이터 링크, TOPLITE EO 정찰 및 추적 시스템, ARPA 레이더, 미니-TYPHOON 7.62㎜ 안정화 무장 스테이션 등이 있다.
두 대의 워크스테이션을 이용하여 전개과정을 감독하는 데 여러 가지 경우의 수를 거쳐 이동 시 장애물 회피, 사전에 프로그래밍된 정찰 등 많은 임무들을 자율적으로 수행할 수 있지만, 목표물 식별이나 무기의 사용 등의 경우에는 엄격한 요구조건을 통해 사람의 참여(man-in-the-loop)가 고려된다. 이것은 이 키트를 전장(戰場) 밖에서 사용하는 데 있어 가장 심각한 한계이다. 사람들은 무장된 로봇이 자유롭게 파도를 헤집고 다니고 레저용 보트나 어선과 동일한 공간을 점유하는 것을 달갑게 여기지 않을 것이다.
해안선 안전을 위해 수많은 다양한 방안들이 현재 제안되고 있는데, 속도가 45kts, 길이 10.7m인 Elbit Systems사의 SILVER MARLIN에서부터 단순하고 원격조종이 가능한 제트 스키인 Elbit사의 STINGRAY, 미 해군의 모듈화 무인 연안수상함정(Modular Unmanned Surface Craft Littoral, MUSCL), DRS Technologies사의 다양한 SEAOWL 제품군과 QinetiQ SENTRY 등이 있다.
해상안전을 위해 복무 중인 또 다른 소형 USV에는 길이 5m의 RHIB SEAFOX가 있다. 이 기종은 Northwind Marine사가 제작한 기종으로서, 해상차단작전 중에 병력을 보호하고 작전의 유연성과 치명적 피해에 도달하기 전의 위협-평가, 의사결정, 상황적 인지를 돕는 더 안전한 ISR 정보 수집을 위해 제공되었다.
미 해군은 현재 2대의 SEAFOX Mk1과 6대의 SEAFOX Mk2를 운용 중에 있으며, 이들을 주로 작전 평가, 특히 강변(riverine) 작전과 원정군의 안전을 위해 사용하고 있다. ‘Trident Warrior’ 2012 훈련 중에 파고 1m에서 SEAFOX에 의한 로봇 해상급유가 새롭게 시험되었다. 또 다른 시험에서는 해군은 2대의 실험용 USV에 카메라들과 컴퓨터시스템, 지향성 음향 확성기, 시각교란레이저, 섬광 경고탄 발사기 등 비살상무기를 장착하여 사용하였다. 즉 최종적으로 살상용 무기를 사용하기 전에 침입자가 의도를 결정하게 하도록 차단하고 위협하는 능력을 시험을 통해 시연하였다. 시험은 해안 지휘소에서의 원격조종 및 사람의 감독 하에서 완전 자율작동이 모두 성공적으로 수행되었다.
기타 임무
| |
 |
|
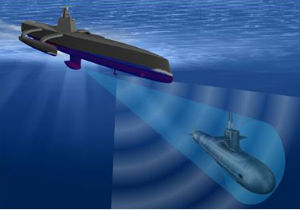
| ▲ 그림 15] 대잠추적 무인정 ACTUV 개념 |
대잠전은 미래에 무인시스템이 역할을 수행할 또 하나의 중요한 분야이다. 미 국방부의 DARPA와 SAIC사가 개발 중인 대잠지속추적무인정(Anti-Submarine Warfare Continuous Trail Unmanned Vessel, ACTUV) 프로그램은 소음 수준이 매우 낮은 디젤-전기 잠수함을 수천 ㎞를 인적요소의 개입을 최소화하면서 수개월 동안 자율적으로 추적할 수 있는 무인수상정을 개발하는 사업이다. ACTUV 플랫폼은 스스로 광범위한 구역을 탐색하기 위한 것이 아니라, 수상함, 잠수함, 헬기 및 해상초계기 등 많은 기존의 대잠 전력으로부터 제공되는 표적신호에 의존한다.
표적 신호를 수신하면 유인 탐색 자산들이 집중적인 탐색을 위해 묶여 있는 상황을 방지하기 위해 ACTUV가 투입되어 자신의 고주파소나를 이용하여 몇 달 동안 접촉을 유지하면서 근접 추적 임무를 수행한다.
| |
 |
|
| ▲ 그림 16] Knifefish UUV 운용 개념 |
SAIC사는 프로그램 1단계에서 독창적인 웨이브피어싱(Wave Piercing) 삼동선 형상의 ACTUV 설계를 제안하였으며, 제안된 설계는 2∼4단계를 통해 개발을 추진할 계획이다.
미 해군의 LCS 대잠전 임무 패키지(ASW MP)도 11m급 USV에 약 2,270㎏의 탑재물을 싣고, 35kts의 속력(예인속도는 20kts), 24시간 이상 연속으로 작전할 수 있는 능력을 포함하고 있다. 이는 저주파수 Bi-static 또는 중주파수 Mono-static을 이용하여 비지속적이고 원거리이며 반-자율적인 ASW 탐지 능력을 제공하게 될 것이다. LCS ASW 임무형 탑재물인 USV예인어레이시스템(USV Towed Array System, UTAS), USV 디핑소나(USV Dipping Sonar, UDS)와 통합될 것이다. 임시 LCS ASW MP 1을 위해 2대의 General Dynamics사의 USV가 미 해군에 이미 인도되었다.
2017년에 배치될 예정인 Knifefish는 미 해군의 연안전투함(LCS)의 기뢰대응책 임무 패키지에서 매우 중요한 역할을 하면서 함대 기뢰전 지휘관이나 승조원들의 기뢰 대응 능력을 한층 향상시켜줄 것으로 기대를 하고 있다.
대형 AUV의 임무도 고려되고 있는데 잠항 중인 적 잠수함을 장기간 동안 추적하는 등의 임무가 포함된다. 록히드마틴사의 AN/WLD-1 원거리다중임무기기(Remote Multi Mission Vehicle, RMMV)의 최초 작전능력이 2017년까지 LCS에 탑재될 계획이며, 각 임무 패키지에 두 대가 탑재될 것이다. 이는 반 잠수기기, 일명 SNORKELER인데, 오직 물위에 더 있는 것은 스노켈링 마스트와 통신 안테나뿐이다. RMMV는 AQS-20A 기뢰탐색소나를 예인하지만, 다중 임무라는 용어에서 알 수 있듯이 시스템은 ASW 임무 및 정보수집 지원에도 적합하게 될 것이며 공중 및 수중 센서 세트가 장착될 수 있을 것이다.
| |
 |
|
| ▲ 그림 17] LCS에서 전개되는 RMMV |
MH-60S는 AQS-20을 예인할 수 없기 때문에 RMMV는 수 년 동안 LCS의 유일한 원거리 수중 센서로 남게 될 것이며 이와 함께 유기적 기뢰 탐색 능력을 제공하기 위해 SDDG-51급 구축함 몇 척에 RMMV를 장착하려던 예전 결정은 번복되었으며, 따라서 LCS가 SNORKELER를 운용하는 유일한 전투함이 될 전망이다.
잠수함과 무인시스템 간의 상호작용은 ASW에만 한정되지 않는다. Saab사는 잠수함 어뢰관으로부터 작동될 수 있는 두 개의 무인시스템 제품군을 설계하고 생산하였다. AUV62는 23인치 어뢰모양 AUV이며 길이는 4∼7m이다.
두 개의 메인 서브세트인 AUV 62-AT는 잠수함의 음향신호를 복제할 수 있기 때문에 ASW 훈련이나 대형 음향 기만기로 사용할 수 있다. AUV62-MR은 대신에 자율적 기뢰 탐색 및 신속환경평가(Rapid Environmental Assessment, REA)에 특화되었다. AUV62-MR은 부상 시 WLAN, UHF/VHF, SATCOM으로, 잠수 중에는 하이드로 어쿠스틱 링크(Hydro Acoustic Link)로 모함과 교신할 수 있다.
| |
 |
|
| ▲ 그림 18] Saab사의 AUV62 운용 개념 |
Saab사가 제안한 또 다른 솔루션은 SUBROV이다. 이는 어뢰모양의 용기 내부에 장착되어 쉽게 취급하고 발사할 수 있다. SUBROV는 여러 가지 임무에 배정될 수 있는데, MCM에서 검사, 개입, 더 큰 AUV62의 회수에 사용될 수 있다. 후자의 경우 SUBROV는 움직여서 AUV62의 뒤에 스스로 위치를 잡고 AUV62를 운전해서 잠수함 어뢰관 속으로 되돌려 넣는다. AUV62의 회수가 완료되면 SUBROV는 어뢰관 내에서 스스로 회수될 수 있다.
이 능력의 일부분은 해안 석유산업을 위해 Saab사가 개발한 SABER-TOOTH ROV 기술로부터 나온 것이다.
| |
 |
|
| ▲ 그림 19] 심해 특수무인정 SHARK |
미 Bluefin Robotics사는 미 DARPA와의 계약에 의해 진행 중인 SHARK(Submarine Hold at Risk)로 알려진 심해 특수 무인잠수정에 대한 심해 시험을 최근에 마쳤다.
이번 시험은 DARPA가 대잠전 탐색 요구 달성을 위하여 이미 확보되어 있는 기술들을 활용하여 개발 중인 분산된 신속기동 잠수함 포착 시스템인 DASH(Distributed Agile Submarine Hunting)사업의 2단계 개발시험의 한 부분으로 수행되었다. 이번 시험에는 무인 잠수정의 확장된 심도에서의 운용성, 압력선체의 설계, 새로운 에너지공급시스템, 새롭게 채택한 고성능 음향 transducer, 그리고 무인정의 진수 및 회수를 위한 이동식 선착장 등에 대한 입증시험 등이 포함되었다.
또한 DARPA는 DASH 프로그램의 일환으로 미 SAIC사에서 개발 중인 TRAPS (Transformational Reliable Acoustic Path System)시스템 시험도 함께 진행 하였다. 이번 시험에서 SHARK와 TRAPS 두 시제품은 은밀성을 갖고 광활한 심해에서 운용 중인 적 잠수함들에 대한 탐색과 추적을 위한 심해에서의 통신상태, 기동성 등 첨단 소나에 대한 향상된 목표성능을 입증시켰으며 향후 무인정인 SHARK와 해저에 분산 배치되는 고정형 수동소나인 TRAPS의 통합 연동시험이 진행될 예정이다.
미 해군 연구소(NRL)는 ‘Black Pearl’로 불리는 대잠수함/기뢰전을 수행할 5척의 차세대 수중 무인체를 개발하고 있는데 개발 솔루션으로 Bluefin Robotics사의 ‘Bluefin 21’을 채택하였다.
“차세대 수중 무인체의 기계, 전기적 그리고 논리적 인터페이스는 물론이고 무인체 탑재장비와 전반적인 임무를 통제할 수중무인체의 컴퓨터 역시 ‘Bluefin 21’의 특성과만 일치 한다.”라고 밝히고 있다. NRL 과학자들은 최근 몇 년에 걸쳐서 ‘Bluefin 21’ 구조와 상호 최적으로 부합될 수 있는 중요한 하드웨어와 소프트웨어를 설계 및 제작하고 있으며 지금까지의 그 어떤 수중무인체 개발과도 전혀 다른 개념의 개발이라고 설명을 하고 있다.
| |
 |
|
| ▲ 그림 20] Bluefin Robotics사의 ‘Bluefin 21’ |
이번 사업 연구관계자들은 GPS/INS /DVL 항법장치가 탑재된 직경이 21인치인 첨단 수중무인체에 요구하는 주요 특성은 저소음추진, 24시간 이상을 운용할 수 있는 충분한 에너지 공급 능력 그리고 그래픽 기반 PC를 통해 임무 계획 tool을 조종하는 운용자가 작전을 통제할 수 있는 성능 등이다.
상위 수준의 ROC를 보면 기동 속도는 시속 5∼9㎞, 잠항 심도는 400m, 전력소비는 시간당 8kW, 항법장치와 연동되는 IXSEA PHINS Ⅲ 자이로, 그리고 수중체의 수평 위치, 속도, 임무상황 등을 측정할 수 있는 도플러 속도 로그 장비와 통합되는 관성항법장치 등이 포함되어 있다.
또한 직선으로 수중 기동 시 위치 정확도는 이동거리의 0.15% 이내 이어야 하며 수중체가 해상에서 Iridium 위성통신 체계를 이용하여 수중체의 상태, 모니터링, 재 명령지시 등을 주기적으로 통제받을 수 있는 초수평선 통신시스템이 탑재되어야 한다.
아울러 수중무인체는 대기뢰전 및 수중전을 위한 광대역 저주파 소나 등을 포함하는 NRL에서 지원하는 몇 가지 탑재장비들과도 연동이 가능하여야 하는 성능 조건을 갖추어야 한다.
| |
 |
|
| ▲ 그림 21] 전투용 UUV ‘MANTA' |
미 해군의 수중전센터는 차세대 무인전투잠수정 개념을 정립하여 21세기 중반에 실전 투입을 목표로 MANTA 무인정을 개발하고 있다.
독립기동으로 모함작전 지원 및 천해에서 대잠전, 기뢰탐색, ISR 임무를 수행할 수 있는 무인전투용 UUV인 MANTA는 유리섬유 재질의 4구간으로 구분된 각각의 압력선체로 구성되어 있고 추진 장치는 Mk48 어뢰와 동일한 제트펌프 추진기를 장착하고 있다. 또한 잠항심도는 244m, 최대속도 10kts, 5kts로 13시간 지속 항해 가능, 배수량은 7톤이며 전장 7.6m, 폭은 2.4m이다.
각국에서는 해양 무인시스템을 전장에서 보다 다양하고 효과적인 적용을 시도하고 있으며 이를 충족시키기 위한 새로운 기술개발에 많은 예산을 투입하고 있다. 특히 최근 영국 국방부는 영국 국방과학연구소를 통한 해양자율체계 개발 지원을 위해 900만 파운드 예산을 할당하였으며 이는 4개의 각각 다른 해양자율분야에 투입될 것이라고 발표하였다.
국방과학연구소 사업 책임자인 필립 스미스(Phillip Smith)는 “이번에 착수하는 해양자율체계 개발이 성공적으로 완료되면 영국은 세계에서 차세대 해양자율임무 시스템 분야를 선도하는 국가로 자리매김할 것이다”라고 기대감을 나타내었다.
| |
 |
|
| ▲ 그림 23]영국 국방부가 구상하는 해양자율체계(UK MoD Supports Future of Maritime Autonomous Systems) |
분야별로 살펴보면 먼저 Solent 지역기업협의회의 중소 방산기업에서는 군사용도의 수중 및 수상 무인정 분야를 담당하고, 국방과학연구소의 자연환경연구위원회에서는 무인정과 함께 해양특성을 탐색하는 적응형(adaptable) 자율해양 네트워크 표준분야를 그리고 영국 혁신기구의 기술전략위원회의 예산으로는 민간 및 군사용 해양무인정 분야의 개발을 담당하게 된다.
이제 전쟁은 사람이 전장까지 직접 이동하여 무기체계를 조작하는 유인시스템의 시대에서 무인체를 원격조종으로 또는 입력된 프로그램에 의한 자율적 모드의 형태로 전쟁을 수행하는 무인시스템의 시대로 급격하게 변하고 있다. 현재 미 공군 전력의 50% 이상이 무인기 전력으로 채워질 만큼 앞으로 전쟁의 패러다임 자체를 바꿔야 하는 시대에 접어들었다. 이러한 현상은 해군 무기체계에도 동일한 변화가 요구되고 있으며 나아가서 무인 무기체계는 지상, 공중 및 해양의 구분이 없는 합동개념으로 운용되는 양상으로 변화될 것으로 전망된다.
참고문헌
1.‘Unmanned Naval Systems’, Military Technology Vol 37, Issue 8, 2013.
2.Navy Unmanned Undersea Vehicle Master Plan. November 9, 2010
3.‘Bluefin-conducts-deep-water-testing-uuv-darpa’, naval-technology.com, 2013.4.5.
4.국방기술품질원, ‘미국의 무인체계 통합 로드맵’, 2012.11.30.
5.U.S. Navy Information Dominance Road-map for Unmanned Systems, December 2010.
6.‘Fighting Pirates with USVs’, asdnews.com, 2011.9.26.
* 본 기사는 '월간로봇' 9월호에서도 볼 수 있습니다. 모든 표기는 '월간로봇'의 규정에 따랐습니다. |
















