|
“야, 그게 뭐였지?”, “모르겠으면 그냥 인터넷에 찾아봐~!”
요즘 친구들끼리 이야기하며 보고 싶은 것, 궁금한 것이 생겼을 때 흔히 들을 수 있는 말이다. 이렇듯 지금 사회는 언제 어디서든 쉽게 정보를 얻을 수 있는 정보사회이다. 최신 이슈는 물론 영화, 그림 등등 무엇이든 말이다. 오래된 정보는 물론 새로운 정보들마저도 인터넷에서 쉽게 볼 수 있음에도 불구하고 미술전, 콘서트, 쇼 등은 아직 사라지지 않고 있다. 그렇다면 이렇게 직접 전시장을 찾아 가는 사람들은 어떤 이유 때문일까? 나는 이번 리얼로봇쇼 2014를 통해 그 의미를 깨닫게 되었다.
로봇을 툭 쳐도 넘어지지 않는 이유는?
지난 8월 6일, 동아리 친구와 선배, 그리고 지도 선생님과 함께 서울 능동 어린이 회관에서 개최되고 있는 리얼로봇쇼 2014에 다녀왔다. 이번에 처음으로 개최된 리얼로봇쇼는 로봇산업의 현황과 앞으로의 비전을 제시함은 물론, 많은 사람들을 대상으로 여러 가지 로봇들을 체험할 수 있도록 함으로써 로봇 문화를 확산시키고 다가올 로봇 시대에 필요한 소양을 길러주기 위해 개최되었다.
| |
 |
|
| ▲ 휴머노이드 댄스 로봇 |
사람들, 특히 어린이들을 주요 대상으로 하여 개최된 전시회이므로, 재미있고 친숙하게 다가갈 수 있도록 만들어진 로봇들이 많았다. 가장 처음으로 본 로봇은 다양한 종류의 휴머노이드 로봇이었다. 모두 비슷해 보였지만, 약간의 구조를 바꾸어 각기 다른 일을 수행하도록 만들어져있었다. 복싱, 골프, 철봉, 댄스 이렇게 총 4가지의 로봇이 있었는데, 이러한 로봇들이 좌우로 회전하는 방식은 보통 사람과는 달라보였다. 사람들은 다리를 들어 올려 움직이는 방식으로 회전을 하지만 이 로봇은 발을 바닥으로부터 떼지 않고 앞뒤로 다리를 벌려 회전을 하였다. 내 생각으로는 2족 로봇이라 다리를 들어 올리게 되면 중심을 잡기 힘들어 이러한 형태의 회전 방법을 선택한 것 같다. 이 로봇을 보던 중, 선생님께서는 하나의 질문을 던지셨다.
“이 로봇을 툭 쳤을 때, 어떻게 균형을 잡을까?” 사실 2족 로봇에서 가장 중요한 요소가 균형을 잡는 것이다. 인간은 너무나도 당연하게 두 발로 걷기 때문에 두 발로 걷는 것에 대한 놀라움이 없지만 실제로 두 발로 걷는 것은 굉장히 어려운 작업이다. 걸을 때마다 중심을 다른 발쪽으로 바꿔야하기 때문에 여간 쉬운 일이 아니다. 걸을 때의 균형뿐만 아니라 서있을 때 땅과 닿는 면적이 작아 서있는 것만으로도 균형을 잡기는 어렵다. 그렇기 때문에 로봇을 툭 쳤을 때 균형을 잡는 것이란 더더욱 힘든 것이다. 나는 사실 이 로봇을 보고 회전하는 법처럼 단순히 눈에 확연히 보이는 차이점에 대해서만 생각했지, 균형을 잡는 법에 대해 생각해보진 못하였다. 선생님께서 힌트로 로봇을 건드렸을 때, 뒤로 약간 몸을 젖힌다는 사실에 주목하라고 하셨다. 자세히 살펴보니, 로봇이 뒤로 넘어지려고 할 때 몸을 뒤로 젖혀 무게 중심을 뒤 쪽으로 보냄으로써 중심을 잡고 있었다. 또 다른 한 가지는 스프링처럼 몸을 뒤로 젖힘으로써 완충 작용을 하는 것이다. 이때부터 전시회의 모든 로봇들이 조금은 다르게 보이기 시작했다.
로봇의 관절과 근육은 어떻게 만드는지?
철봉 로봇을 처음 봤을 때, 내심 반가웠다. 왜냐하면 우리 학교에서 이러한 로봇이 있기 때문이다. 동아리 7기 선배들이 NXT를 이용하여 스스로 철봉을 회전하는 로봇을 만든 것을 본 적이 있다. 그래서 이 로봇도 별반 다를 바 없을 것이라 생각하였는데, 내 생각은 오산이었다. 학교에서 보았던 로봇보다도 훨씬 더 다이나믹하게 회전하였다. 선생님께서는 하체만 사용하는 보통 철봉 로봇과는 달리, 상체도 같이 사용함으로써 회전을 더욱 화려하게 보여주고 있는 것이라고 말씀해주셨다.
다음으로는 로봇들이 연기를 하는 뮤지컬을 보았다. 이 뮤지컬에는 아까 본 것과는 달리 사람 정도 크기의 휴머노이드를 볼 수 있었다. 이번 로봇쇼에서 가장 기억에 남는 로봇이었는데, 그 이유는 로봇의 움직임이 정말 사람과 유사하였기 때문이다. 때때로 휴머노이드의 손이나 팔 움직임에 있어서 약간의 끊김과 불연속적인 움직임들을 볼 수 있는데 이 로봇은 사람이 움직이는 것과 똑같이 연속적으로 부드럽게 움직임을 표현하고 있었다. 이 사실에 놀라워하고 있을 때, 선생님께서는 이 로봇이 저렇게 움직일 수 있는 것은 모든 관절과 근육의 움직임을 모터로만 제어하지 않았기 때문이라고 말씀하셨다. 나는 처음에 이 말을 듣고 의아하였다. 어떻게 모터를 사용하지 않을 수 있지? 어떠한 이유로? 모터를 사용하지 않는 이유는 모터 자체가 디지털화 되어있어 값이 아날로그적으로 나올 수 없기 때문이다. 아날로그적으로 값이 나오기 위해서는 유압 장치 혹은 공압 장치를 사용해야 한다고 하셨다.
나는 이를 통해 내가 원하는 로봇을 만들기 위해서는 역학 기구에 대해 많이 알 필요가 있다고 느꼈다. 기구를 많이 알아야 내가 어떠한 문제를 해결해야 할 때, 이 문제에 대해 적합한 기구를 사용할 수 있기 때문이다. 만약 나처럼 유압 장치 혹은 공압 장치로 부드러운 움직임을 표현할 수 있다는 사실을 모르고 있었다면, 모든 관절과 근육의 움직임을 모터로만 구현하려다가 결국 실패하였을 것이다.
| |
 |
|
| ▲ 휴머노이드 철봉 로봇(사진 좌측)과 휴머노이드 뮤지컬 로봇 : 로보데스피언(사진 우측) |
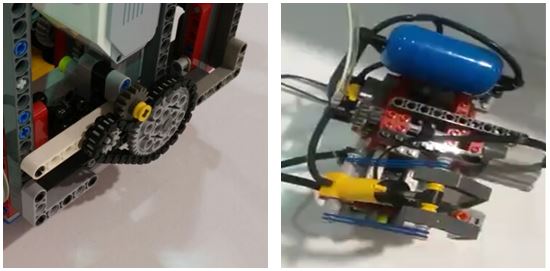
다음으로 눈에 띈 것은 최근 LEGO사에서 출시한 로봇 플랫폼으로 NXT의 업그레이드 버전이라 할 수 있는 EV3였다. 최근에 열렸던 WRO(World Robot Olympiad) Korea 2014 대회에 EV3를 활용하여 창작 로봇을 만들었던 나에게는 더욱 반가운 로봇들이었다. 특히 다양한 체인과 기어를 이용하여 만든 작품들이 인상적이었는데, WRO를 준비하기 위해 EV3를 사용할 때 체인이 자꾸 풀린다거나 기어가 잘 맞물리지 않는다는 등 여러 가지 어려움을 겪었기 때문이다. 특히 내가 만든 작품의 기반이 된 테오 얀센(Theo Jansen)의 움직이는 조각 구조를 구현할 때는 체인이 자꾸 끊기거나 튕기는 일이 잦았고, 기어의 경우에는 어긋나거나 헛도는 경우도 많았다. 그럴 때마다, NXT 체인 자체가 원래부터 약해서 사용이 어려운 것이라고 했던 동료들의 말을 믿고 쉽게 체념한 적도 많았다.
하지만 전시된 로봇은 그렇지 않았다. 나는 개발자에게 인사한 후 바로 체인에 대해서부터 물었다. “어떻게 체인을 이렇게 사용하셨어요? NXT 체인 같은 경우에는 약해서 잘 못쓴다던데…” 그러자 개발자는 “아뇨? NXT 체인은 굉장히 튼튼하게 제작되어있는걸요. 그냥 잡아당기면 잘 끊어지지 않아요. 체인 사용은 기어를 어떻게 잘 사용하는 지에 대해 달려있는 것이에요.”라고 답했다. 기어의 사용도 마찬가지였다. 어떻게 사용하는 가에 따라 결과는 달라지는 것이라고, 개발자 역시 처음에는 기어를 어떻게 사용해야할지 몰라 우여곡절을 겪었다고 하였다. 하지만 많은 개발 과정에서 부품에 대한 이해도가 높아지고 어떻게 다뤄야할 지를 알아가며 자신이 표현하고 싶은 움직임을 제대로 구현할 수 있게 되었다고 하였다.
WRO를 준비하면서 공압 장치의 사용에 애를 먹었던 친구는, 터치 센서를 이용해 공기가 모두 빠졌다는 것을 인지하면 스위치가 자동으로 켜지도록 하여 사람의 관여 없이 공압 장치를 스스로 작동시키는 로봇을 보고 매우 놀라워했다. 나와 친구는 각 기계 장치의 특성을 제대로 이해해야 어떠한 상황에서 어떤 부품이 적합한 지 판단하여 효율적으로 그 상황을 해결할 수 있다는 것을 알았다. 그리고 각 장치에 대해 정확히 이해하기 위해서는 많이 접해보고 만져봐야 된다는 것, 결국 열정과 노력이 필요하다는 것을 깊이 깨달았던 순간이었다.
| |
 |
|
| ▲ 체인의 사용(사진 좌측), 공압장치의 사용(사진 우측) |
진정한 ‘Real’의 의미는?
이번 리얼로봇쇼를 통해서 이전에는 미처 생각하지 못했던 중요한 부분들에 대해 깊이 생각해볼 수 있었고, 공학적 문제해결에 대한 생각의 폭을 넓힐 수 있었다. 또한 리얼로봇쇼에서 전문가와의 대화를 통해 다양한 장치와 기구들을 적절히 활용하는 방법에 대해 알게 되었고, 앞으로 로봇공학자로서의 길을 걷기 위해서 어떠한 노력이 필요한 지에 대해 느낄 수 있었다.
뿐만 아니라 서로의 생각을 교환하며 나도 새로운 아이디어를 제공할 수 있었고, 나의 아이디어에 살을 붙일 수 있었다. 내가 알게 되고 느끼게 된 것들은 모두 다른 사람들과의 대화를 통해 얻은 것들이다. 즉, 이번 쇼에서 나는 단순히 인터넷에서 쉽게 구할 수 있는 ‘정보’를 얻은 것이 아니라 ‘교류’를 통한 ‘생각’을 얻게 되었던 것이다. 인터넷에 넘실거리는 정보의 늪에서 벗어나 진정한 교류를 통해 생각을 주고받는 것, 바로 이것이 진정한 ‘Real’의 의미가 아닐까?▒ 이선경∙학생기자(경기북과학고등학교 1학년) |

















